Feigenbaum originally related the first constant to the period-doubling bifurcations in the logistic map, but also showed it to hold for all one-dimensionalmaps with a single quadraticmaximum. As a consequence of this generality, every chaotic system that corresponds to this description will bifurcate at the same rate. Feigenbaum made this discovery in 1975, and he officially published it in 1978.
The first constant
The first Feigenbaum constant or simply Feigenbaum constant δ is the limiting ratio of each bifurcation interval to the next between every period doubling, of a one-parameter map
where f (x) is a function parameterized by the bifurcation parameter a.
It is given by the limit:
where an are discrete values of a at the nth period doubling.
This gives its numerical value: (sequence A006890 in the OEIS)
A simple rational approximation is: 621/133, which is correct to 5 significant values (when rounding). For more precision use 1228/263, which is correct to 7 significant values.
Is approximately equal to 10/π − 1, with an error of 0.0047%
Illustration
Non-linear maps
To see how this number arises, consider the real one-parameter map
Here a is the bifurcation parameter, x is the variable. The values of a for which the period doubles (e.g. the largest value for a with no period-2 orbit, or the largest a with no period-4 orbit), are a1, a2 etc. These are tabulated below:
n
Period
Bifurcation parameter (an)
Ratio an−1 − an−2/an − an−1
1
2
0.75
—
2
4
1.25
—
3
8
1.3680989
4.2337
4
16
1.3940462
4.5515
5
32
1.3996312
4.6458
6
64
1.4008286
4.6639
7
128
1.4010853
4.6682
8
256
1.4011402
4.6689
The ratio in the last column converges to the first Feigenbaum constant. The same number arises for the logistic map
with real parameter a and variable x. Tabulating the bifurcation values again:
n
Period
Bifurcation parameter (an)
Ratio an−1 − an−2/an − an−1
1
2
3
—
2
4
3.4494897
—
3
8
3.5440903
4.7514
4
16
3.5644073
4.6562
5
32
3.5687594
4.6683
6
64
3.5696916
4.6686
7
128
3.5698913
4.6680
8
256
3.5699340
4.6768
Fractals
Self-similarity in the Mandelbrot set shown by zooming in on a round feature while panning in the negative-x direction. The display center pans from (−1, 0) to (−1.31, 0) while the view magnifies from 0.5 × 0.5 to 0.12 × 0.12 to approximate the Feigenbaum ratio.
In the case of the Mandelbrot set for complex quadratic polynomial
f(z)=z2+c
the Feigenbaum constant is the limiting ratio between the diameters of successive circles on the real axis in the complex plane (see animation on the right).
n
Period = 2n
Bifurcation parameter (cn)
Ratio =cn−1−cn−2cn−cn−1
1
2
−0.75
—
2
4
−1.25
—
3
8
−1.3680989
4.2337
4
16
−1.3940462
4.5515
5
32
−1.3996312
4.6459
6
64
−1.4008287
4.6639
7
128
−1.4010853
4.6668
8
256
−1.4011402
4.6740
9
512
−1.401151982029
4.6596
10
1024
−1.401154502237
4.6750
…
…
…
…
∞
−1.4011551890…
Bifurcation parameter is a root point of period-2n component. This series converges to the Feigenbaum point c = −1.401155…… The ratio in the last column converges to the first Feigenbaum constant.
Julia set for the Feigenbaum point
Other maps also reproduce this ratio; in this sense the Feigenbaum constant in bifurcation theory is analogous to π in geometry and e in calculus.
The second constant
The second Feigenbaum constant or Feigenbaum reduction parameter α is given by: (sequence A006891 in the OEIS)
It is the ratio between the width of a tine and the width of one of its two subtines (except the tine closest to the fold). A negative sign is applied to α when the ratio between the lower subtine and the width of the tine is measured.
These numbers apply to a large class of dynamical systems (for example, dripping faucets to population growth).
A simple rational approximation is 13/11 × 17/11 × 37/27 = 8177/3267.
Properties
Both numbers are believed to be transcendental, although they have not been proven to be so. In fact, there is no known proof that either constant is even irrational.
The first proof of the universality of the Feigenbaum constants was carried out by Oscar Lanford—with computer-assistance—in 1982 (with a small correction by Jean-Pierre Eckmann and Peter Wittwer of the University of Geneva in 1987). Over the years, non-numerical methods were discovered for different parts of the proof, aiding Mikhail Lyubich in producing the first complete non-numerical proof.
Other values
The period-3 window in the logistic map also has a period-doubling route to chaos, reaching chaos at , and it has its own two Feigenbaum constants: .
we have a function , and we want to study what happens when we iterate the map many times. The map might fall into a fixed point, a fixed cycle, or chaos. When the map falls into a stable fixed cycle of length n, we would find that the graph of frn and the graph of x↦x intersects at n points, and the slope of the graph of frn is bounded in at those intersections.
For example, when 0, we have a single intersection, with slope bounded in , indicating that it is a stable single fixed point.
As r increases to beyond , the intersection point splits to two, which is a period doubling. For example, when , there are three intersection points, with the middle one unstable, and the two others stable.
As r approaches , another period-doubling occurs in the same way. The period-doublings occur more and more frequently, until at a certain , the period doublings become infinite, and the map becomes chaotic. This is the period-doubling route to chaos.
Relationship between and xn when . Before the period doubling bifurcation occurs. The orbit converges to the fixed point .
Relationship between and xn when . The tangent slope at the fixed point xf2. is exactly 1, and a period doubling bifurcation occurs.
Relationship between and xn when.3. The fixed point xf2 becomes unstable, splitting into a periodic-2 stable cycle.
When , we have a single intersection, with slope exactly +1, indicating that it is about to undergo a period-doubling.
When , there are three intersection points, with the middle one unstable, and the two others stable.
When , there are three intersection points, with the middle one unstable, and the two others having slope exactly +1, indicating that it is about to undergo another period-doubling.
When r≈3.56994567, there are infinitely many intersections, and we have arrived at chaos via the period-doubling route.
Scaling limit
[edit]
Approach to the scaling limit as r approaches r∗=3.5699⋯ from below.At the point of chaos r∗=3.5699⋯, as we repeat the period-doublingsfr∗1,fr∗2,fr∗4,fr∗8,fr∗16,…, the graphs seem to resemble each other, except that they are shrunken towards the middle, and rotated by 180 degrees, converging to a fractal.
Looking at the images, one can notice that at the point of chaos r∗=3.5699⋯, the curve of fr∗∞ looks like a fractal. Furthermore, as we repeat the period-doublingsfr∗1,fr∗2,fr∗4,fr∗8,fr∗16,…, the graphs seem to resemble each other, except that they are shrunken towards the middle, and rotated by 180 degrees.
This suggests to us a scaling limit: if we repeatedly double the function, then scale it up by α for a certain constant α:f(x)↦−αf(f(−x/α))then at the limit, we would end up with a function g that satisfies g(x)=−αg(g(−x/α)). Further, as the period-doubling intervals become shorter and shorter, the ratio between two period-doubling intervals converges to a limit, the first Feigenbaum constant δ=4.6692016⋯.
Duration: 3 seconds.0:03For the wrong values of scaling factor α, the map does not converge to a limit, but when α=2.5029…, it converges.At the point of chaos r∗=3.5699⋯, as we repeat the functional equation iteration f(x)↦−αf(f(−x/α)) with α=2.5029…, we find that the map does converge to a limit.
The constant α can be numerically found by trying many possible values. For the wrong values, the map does not converge to a limit, but when it is α=2.5029…, it converges. This is the second Feigenbaum constant.
Chaotic regime
[edit]
In the chaotic regime, fr∞, the limit of the iterates of the map, becomes chaotic dark bands interspersed with non-chaotic bright bands.
In the chaotic regime, fr∞, the limit of the iterates of the map, becomes chaotic dark bands interspersed with non-chaotic bright bands.
Other scaling limits
[edit]
When r approaches r≈3.8494344, we have another period-doubling approach to chaos, but this time with periods 3, 6, 12, … This again has the same Feigenbaum constants δ,α. The limit of f(x)↦−αf(f(−x/α)) is also the same function. This is an example of universality.
Duration: 12 seconds.0:12Logistic map approaching the period-doubling chaos scaling limit r∗=3.84943… from below. At the limit, this has the same shape as that of r∗=3.5699⋯, since all period-doubling routes to chaos are the same (universality).
We can also consider period-tripling route to chaos by picking a sequence of r1,r2,… such that rn is the lowest value in the period-3n window of the bifurcation diagram. For example, we have r1=3.8284,r2=3.85361,…, with the limit r∞=3.854077963…. This has a different pair of Feigenbaum constants δ=55.26…,α=9.277….[2] And fr∞converges to the fixed point tof(x)↦−αf(f(f(−x/α)))As another example, period-4-pling has a pair of Feigenbaum constants distinct from that of period-doubling, even though period-4-pling is reached by two period-doublings. In detail, define r1,r2,… such that rn is the lowest value in the period-4n window of the bifurcation diagram. Then we have r1=3.960102,r2=3.9615554,…, with the limit r∞=3.96155658717…. This has a different pair of Feigenbaum constants δ=981.6…,α=38.82….
In general, each period-multiplying route to chaos has its own pair of Feigenbaum constants. In fact, there are typically more than one. For example, for period-7-pling, there are at least 9 different pairs of Feigenbaum constants.[2]
Generally, 3δ≈2α2, and the relation becomes exact as both numbers increase to infinity: limδ/α2=2/3.
Feigenbaum-Cvitanović functional equation
[edit]
This functional equation arises in the study of one-dimensional maps that, as a function of a parameter, go through a period-doubling cascade. Discovered by Mitchell Feigenbaum and Predrag Cvitanović,[3] the equation is the mathematical expression of the universality of period doubling. It specifies a function g and a parameter α by the relation
g(x)=−αg(g(−x/α))
with the initial conditions{g(0)=1,g′(0)=0,g″(0)<0.For a particular form of solution with a quadratic dependence of the solution near x = 0, α = 2.5029… is one of the Feigenbaum constants.
The power series of g is approximately[4]g(x)=1−1.52763×2+0.104815×4+0.026705×6+O(x8)
Renormalization
[edit]
The Feigenbaum function can be derived by a renormalization argument.[5]
The Feigenbaum function satisfies[6]g(x)=limn→∞1F(2n)(0)F(2n)(xF(2n)(0))for any map on the real line F at the onset of chaos.
Scaling function
[edit]
The Feigenbaum scaling function provides a complete description of the attractor of the logistic map at the end of the period-doubling cascade. The attractor is a Cantor set, and just as the middle-third Cantor set, it can be covered by a finite set of segments, all bigger than a minimal size dn. For a fixed dn the set of segments forms a cover Δn of the attractor. The ratio of segments from two consecutive covers, Δn and Δn+1 can be arranged to approximate a function σ, the Feigenbaum scaling function.
A plot of the Lorenz attractor for values r = 28, σ = 10, b = 8/3
A metaphor for this behavior is that a butterfly flapping its wings in Brazil can cause a tornado in Texas. Small differences in initial conditions, such as those due to errors in measurements or due to rounding errors in numerical computation, can yield widely diverging outcomes for such dynamical systems, rendering long-term prediction of their behavior impossible in general.
This can happen even though these systems are deterministic, meaning that their future behavior follows a unique evolution and is fully determined by their initial conditions, with no random elements involved. In other words, the deterministic nature of these systems does not make them predictable.
An animation of a double-rod pendulum at an intermediate energy showing chaotic behavior. Starting the pendulum from a slightly different initial condition would result in a vastly different trajectory. The double-rod pendulum is one of the simplest dynamical systems with chaotic solutions.
This behavior is known as deterministic chaos, or simply chaos. The theory was summarized by Edward Lorenz as:
Chaos: When the present determines the future but the approximate present does not approximately determine the future.
Chaos theory concerns deterministic systems whose behavior can, in principle, be predicted. Chaotic systems are predictable for a while and then ‘appear’ to become random. The amount of time for which the behavior of a chaotic system can be effectively predicted depends on three things: how much uncertainty can be tolerated in the forecast, how accurately its current state can be measured, and a time scale depending on the dynamics of the system, called the Lyapunov time. Some examples of Lyapunov times are: chaotic electrical circuits, about 1 millisecond; weather systems, a few days (unproven); the inner solar system, 4 to 5 million years. In chaotic systems, the uncertainty in a forecast increases exponentially with elapsed time. Hence, mathematically, doubling the forecast time more than squares the proportional uncertainty in the forecast. This means, in practice, a meaningful prediction cannot be made over an interval of more than two or three times the Lyapunov time. When meaningful predictions cannot be made, the system appears random.
Chaotic dynamics
In common usage, “chaos” means “a state of disorder”. However, in chaos theory, the term is defined more precisely. Although no universally accepted mathematical definition of chaos exists, a commonly used definition, originally formulated by Robert L. Devaney, says that to classify a dynamical system as chaotic, it must have these properties:
The map defined by x → 4 x (1 – x) and y → (x + y)mod 1 displays sensitivity to initial x positions. Here, two series of x and y values diverge markedly over time from a tiny initial difference.
In some cases, the last two properties above have been shown to actually imply sensitivity to initial conditions. In the discrete-time case, this is true for all continuousmaps on metric spaces. In these cases, while it is often the most practically significant property, “sensitivity to initial conditions” need not be stated in the definition.
If attention is restricted to intervals, the second property implies the other two. An alternative and a generally weaker definition of chaos uses only the first two properties in the above list.
Lorenz equations used to generate plots for the y variable. The initial conditions for x and z were kept the same but those for y were changed between 1.001, 1.0001 and 1.00001. The values for , and were 45.91, 16 and 4 respectively. As can be seen from the graph, even the slightest difference in initial values causes significant changes after about 12 seconds of evolution in the three cases. This is an example of sensitive dependence on initial conditions.
Sensitivity to initial conditions means that each point in a chaotic system is arbitrarily closely approximated by other points that have significantly different future paths or trajectories. Thus, an arbitrarily small change or perturbation of the current trajectory may lead to significantly different future behavior.
Sensitivity to initial conditions is popularly known as the “butterfly effect“, so-called because of the title of a paper given by Edward Lorenz in 1972 to the American Association for the Advancement of Science in Washington, D.C., entitled Predictability: Does the Flap of a Butterfly’s Wings in Brazil set off a Tornado in Texas?. The flapping wing represents a small change in the initial condition of the system, which causes a chain of events that prevents the predictability of large-scale phenomena. Had the butterfly not flapped its wings, the trajectory of the overall system could have been vastly different.
As suggested in Lorenz’s book entitled The Essence of Chaos, published in 1993, “sensitive dependence can serve as an acceptable definition of chaos”. In the same book, Lorenz defined the butterfly effect as: “The phenomenon that a small alteration in the state of a dynamical system will cause subsequent states to differ greatly from the states that would have followed without the alteration.” The above definition is consistent with the sensitive dependence of solutions on initial conditions (SDIC). An idealized skiing model was developed to illustrate the sensitivity of time-varying paths to initial positions. A predictability horizon can be determined before the onset of SDIC (i.e., prior to significant separations of initial nearby trajectories).
A consequence of sensitivity to initial conditions is that if we start with a limited amount of information about the system (as is usually the case in practice), then beyond a certain time, the system would no longer be predictable. This is most prevalent in the case of weather, which is generally predictable only about a week ahead. This does not mean that one cannot assert anything about events far in the future—only that some restrictions on the system are present. For example, we know that the temperature of the surface of the earth will not naturally reach 100 °C (212 °F) or fall below −130 °C (−202 °F) on earth (during the current geologic era), but we cannot predict exactly which day will have the hottest temperature of the year.
In more mathematical terms, the Lyapunov exponent measures the sensitivity to initial conditions, in the form of rate of exponential divergence from the perturbed initial conditions. More specifically, given two starting trajectories in the phase space that are infinitesimally close, with initial separation , the two trajectories end up diverging at a rate given by
where t is the time and λ is the Lyapunov exponent. The rate of separation depends on the orientation of the initial separation vector, so a whole spectrum of Lyapunov exponents can exist. The number of Lyapunov exponents is equal to the number of dimensions of the phase space, though it is common to just refer to the largest one. For example, the maximal Lyapunov exponent (MLE) is most often used, because it determines the overall predictability of the system. A positive MLE is usually taken as an indication that the system is chaotic.
In addition to the above property, other properties related to sensitivity of initial conditions also exist. These include, for example, measure-theoreticalmixing (as discussed in ergodic theory) and properties of a K-system.
Non-periodicity
A chaotic system may have sequences of values for the evolving variable that exactly repeat themselves, giving periodic behavior starting from any point in that sequence. However, such periodic sequences are repelling rather than attracting, meaning that if the evolving variable is outside the sequence, however close, it will not enter the sequence and in fact, will diverge from it. Thus for almost all initial conditions, the variable evolves chaotically with non-periodic behavior.
Topological mixing
Six iterations of a set of states passed through the logistic map. The first iterate (blue) is the initial condition, which essentially forms a circle. Animation shows the first to the sixth iteration of the circular initial conditions. It can be seen that mixing occurs as we progress in iterations. The sixth iteration shows that the points are almost completely scattered in the phase space. Had we progressed further in iterations, the mixing would have been homogeneous and irreversible. The logistic map has equation . To expand the state-space of the logistic map into two dimensions, a second state, , was created as , if and otherwise.
The map defined by x → 4 x (1 – x) and y → (x + y)mod 1 also displays topological mixing. Here, the blue region is transformed by the dynamics first to the purple region, then to the pink and red regions, and eventually to a cloud of vertical lines scattered across the space.
Topological mixing (or the weaker condition of topological transitivity) means that the system evolves over time so that any given region or open set of its phase space eventually overlaps with any other given region. This mathematical concept of “mixing” corresponds to the standard intuition, and the mixing of colored dyes or fluids is an example of a chaotic system.
Topological mixing is often omitted from popular accounts of chaos, which equate chaos with only sensitivity to initial conditions. However, sensitive dependence on initial conditions alone does not give chaos. For example, consider the simple dynamical system produced by repeatedly doubling an initial value. This system has sensitive dependence on initial conditions everywhere, since any pair of nearby points eventually becomes widely separated. However, this example has no topological mixing, and therefore has no chaos. Indeed, it has extremely simple behavior: all points except 0 tend to positive or negative infinity.
Topological transitivity
A map is said to be topologically transitive if for any pair of non-empty open sets ⊂X, there exists such that V≠∅. Topological transitivity is a weaker version of topological mixing. Intuitively, if a map is topologically transitive then given a point x and a region V, there exists a point y near x whose orbit passes through V. This implies that it is impossible to decompose the system into two open sets.
An important related theorem is the Birkhoff Transitivity Theorem. It is easy to see that the existence of a dense orbit implies topological transitivity. The Birkhoff Transitivity Theorem states that if X is a second countable, complete metric space, then topological transitivity implies the existence of a dense set of points in X that have dense orbits.
Density of periodic orbits
For a chaotic system to have denseperiodic orbits means that every point in the space is approached arbitrarily closely by periodic orbits. The one-dimensional logistic map defined by x → 4 x (1 – x) is one of the simplest systems with density of periodic orbits. For example, → → (or approximately 0.3454915 → 0.9045085 → 0.3454915) is an (unstable) orbit of period 2, and similar orbits exist for periods 4, 8, 16, etc. (indeed, for all the periods specified by Sharkovskii’s theorem).
Sharkovskii’s theorem is the basis of the Li and Yorke (1975) proof that any continuous one-dimensional system that exhibits a regular cycle of period three will also display regular cycles of every other length, as well as completely chaotic orbits.
Strange attractors
The Lorenz attractor displays chaotic behavior. These two plots demonstrate sensitive dependence on initial conditions within the region of phase space occupied by the attractor.
Some dynamical systems, like the one-dimensional logistic map defined by x → 4 x (1 – x), are chaotic everywhere, but in many cases chaotic behavior is found only in a subset of phase space. The cases of most interest arise when the chaotic behavior takes place on an attractor, since then a large set of initial conditions leads to orbits that converge to this chaotic region.
An easy way to visualize a chaotic attractor is to start with a point in the basin of attraction of the attractor, and then simply plot its subsequent orbit. Because of the topological transitivity condition, this is likely to produce a picture of the entire final attractor, and indeed both orbits shown in the figure on the right give a picture of the general shape of the Lorenz attractor. This attractor results from a simple three-dimensional model of the Lorenz weather system. The Lorenz attractor is perhaps one of the best-known chaotic system diagrams, probably because it is not only one of the first, but it is also one of the most complex, and as such gives rise to a very interesting pattern that, with a little imagination, looks like the wings of a butterfly.
Unlike fixed-point attractors and limit cycles, the attractors that arise from chaotic systems, known as strange attractors, have great detail and complexity. Strange attractors occur in both continuous dynamical systems (such as the Lorenz system) and in some discrete systems (such as the Hénon map). Other discrete dynamical systems have a repelling structure called a Julia set, which forms at the boundary between basins of attraction of fixed points. Julia sets can be thought of as strange repellers. Both strange attractors and Julia sets typically have a fractal structure, and the fractal dimension can be calculated for them.
Coexisting attractors
Coexisting chaotic and non-chaotic attractors within the generalized Lorenz model There are 128 orbits in different colors, beginning with different initial conditions for dimensionless time between 0.625 and 5 and a heating parameter r = 680. Chaotic orbits recurrently return close to the saddle point at the origin. Nonchaotic orbits eventually approach one of two stable critical points, as shown with large blue dots. Chaotic and nonchaotic orbits occupy different regions of attraction within the phase space.
In contrast to single type chaotic solutions, recent studies using Lorenz models have emphasized the importance of considering various types of solutions. For example, coexisting chaotic and non-chaotic may appear within the same model (e.g., the double pendulum system) using the same modeling configurations but different initial conditions. The findings of attractor coexistence, obtained from classical and generalized Lorenz models, suggested a revised view that “the entirety of weather possesses a dual nature of chaos and order with distinct predictability”, in contrast to the conventional view of “weather is chaotic”.
Minimum complexity of a chaotic system
Bifurcation diagram of the logistic map x → r x (1 – x). Each vertical slice shows the attractor for a specific value of r. The diagram displays period-doubling as r increases, eventually producing chaos. Darker points are visited more frequently.
Discrete chaotic systems, such as the logistic map, can exhibit strange attractors whatever their dimensionality. In contrast, for continuous dynamical systems, the Poincaré–Bendixson theorem shows that a strange attractor can only arise in three or more dimensions. Finite-dimensionallinear systems are never chaotic; for a dynamical system to display chaotic behavior, it must be either nonlinear or infinite-dimensional.
The Poincaré–Bendixson theorem states that a two-dimensional differential equation has very regular behavior. The Lorenz attractor discussed below is generated by a system of three differential equations such as:
where , , and make up the system state, is time, and , , are the system parameters. Five of the terms on the right hand side are linear, while two are quadratic; a total of seven terms. Another well-known chaotic attractor is generated by the Rössler equations, which have only one nonlinear term out of seven. Sprott found a three-dimensional system with just five terms, that had only one nonlinear term, which exhibits chaos for certain parameter values. Zhang and Heidel showed that, at least for dissipative and conservative quadratic systems, three-dimensional quadratic systems with only three or four terms on the right-hand side cannot exhibit chaotic behavior. The reason is, simply put, that solutions to such systems are asymptotic to a two-dimensional surface and therefore solutions are well behaved.
While the Poincaré–Bendixson theorem shows that a continuous dynamical system on the Euclidean plane cannot be chaotic, two-dimensional continuous systems with non-Euclidean geometry can still exhibit some chaotic properties. Perhaps surprisingly, chaos may occur also in linear systems, provided they are infinite dimensional. A theory of linear chaos is being developed in a branch of mathematical analysis known as functional analysis.
The above set of three ordinary differential equations has been referred to as the three-dimensional Lorenz model. Since 1963, higher-dimensional Lorenz models have been developed in numerous studies for examining the impact of an increased degree of nonlinearity, as well as its collective effect with heating and dissipations, on solution stability.
Infinite dimensional maps
The straightforward generalization of coupled discrete maps is based upon convolution integral which mediates interaction between spatially distributed maps: ,
where kernel is propagator derived as Green function of a relevant physical system, might be logistic map alike or complex map. For examples of complex maps the Julia set or Ikeda map may serve. When wave propagation problems at distance L=ct with wavelength λ=2π/k are considered the kernel K may have a form of Green function for Schrödinger equation:.
.
Spontaneous order
Under the right conditions, chaos spontaneously evolves into a lockstep pattern. In the Kuramoto model, four conditions suffice to produce synchronization in a chaotic system. Examples include the coupled oscillation of Christiaan Huygens‘ pendulums, fireflies, neurons, the London Millennium Bridge resonance, and large arrays of Josephson junctions.
Moreover, from the theoretical physics standpoint, dynamical chaos itself, in its most general manifestation, is a spontaneous order. The essence here is that most orders in nature arise from the spontaneous breakdown of various symmetries. This large family of phenomena includes elasticity, superconductivity, ferromagnetism, and many others. According to the supersymmetric theory of stochastic dynamics, chaos, or more precisely, its stochastic generalization, is also part of this family. The corresponding symmetry being broken is the topological supersymmetry which is hidden in all stochastic (partial) differential equations, and the corresponding order parameter is a field-theoretic embodiment of the butterfly effect.
James Clerk Maxwell is seen as being one of the earliest to discuss chaos theory, with work in the 1860s and 1870s. An early proponent of chaos theory was Henri Poincaré. In the 1880s, while studying the three-body problem, he found that there can be orbits that are nonperiodic, and yet not forever increasing nor approaching a fixed point. In 1898, Jacques Hadamard published an influential study of the chaotic motion of a free particle gliding frictionlessly on a surface of constant negative curvature, called “Hadamard’s billiards“. Hadamard was able to show that all trajectories are unstable, in that all particle trajectories diverge exponentially from one another, with a positive Lyapunov exponent.
Chaos theory began in the field of ergodic theory. Later studies, also on the topic of nonlinear differential equations, were carried out by George David Birkhoff, Andrey Nikolaevich Kolmogorov, Mary Lucy Cartwright and John Edensor Littlewood, and Stephen Smale. Although chaotic planetary motion had not been observed, experimentalists had encountered turbulence in fluid motion and nonperiodic oscillation in radio circuits without the benefit of a theory to explain what they were seeing.
Despite initial insights in the first half of the twentieth century, chaos theory became formalized as such only after mid-century, when it first became evident to some scientists that linear theory, the prevailing system theory at that time, simply could not explain the observed behavior of certain experiments like that of the logistic map. What had been attributed to measure imprecision and simple “noise” was considered by chaos theorists as a full component of the studied systems. In 1959 Boris Valerianovich Chirikov proposed a criterion for the emergence of classical chaos in Hamiltonian systems (Chirikov criterion). He applied this criterion to explain some experimental results on plasma confinement in open mirror traps.This is regarded as the very first physical theory of chaos, which succeeded in explaining a concrete experiment. And Boris Chirikov himself is considered as a pioneer in classical and quantum chaos.
The main catalyst for the development of chaos theory was the electronic computer. Much of the mathematics of chaos theory involves the repeated iteration of simple mathematical formulas, which would be impractical to do by hand. Electronic computers made these repeated calculations practical, while figures and images made it possible to visualize these systems. As a graduate student in Chihiro Hayashi’s laboratory at Kyoto University, Yoshisuke Ueda was experimenting with analog computers and noticed, on November 27, 1961, what he called “randomly transitional phenomena”. Yet his advisor did not agree with his conclusions at the time, and did not allow him to report his findings until 1970.
Edward Lorenz was an early pioneer of the theory. His interest in chaos came about accidentally through his work on weather prediction in 1961. Lorenz and his collaborator Ellen Fetter and Margaret Hamilton were using a simple digital computer, a Royal McBeeLGP-30, to run weather simulations. They wanted to see a sequence of data again, and to save time they started the simulation in the middle of its course. They did this by entering a printout of the data that corresponded to conditions in the middle of the original simulation. To their surprise, the weather the machine began to predict was completely different from the previous calculation. They tracked this down to the computer printout. The computer worked with 6-digit precision, but the printout rounded variables off to a 3-digit number, so a value like 0.506127 printed as 0.506. This difference is tiny, and the consensus at the time would have been that it should have no practical effect. However, Lorenz discovered that small changes in initial conditions produced large changes in long-term outcome. Lorenz’s discovery, which gave its name to Lorenz attractors, showed that even detailed atmospheric modeling cannot, in general, make precise long-term weather predictions.
In 1963, Benoit Mandelbrot, studying information theory, discovered that noise in many phenomena (including stock prices and telephone circuits) was patterned like a Cantor set, a set of points with infinite roughness and detail Mandelbrot described both the “Noah effect” (in which sudden discontinuous changes can occur) and the “Joseph effect” (in which persistence of a value can occur for a while, yet suddenly change afterwards). In 1967, he published “How long is the coast of Britain? Statistical self-similarity and fractional dimension“, showing that a coastline’s length varies with the scale of the measuring instrument, resembles itself at all scales, and is infinite in length for an infinitesimally small measuring device. Arguing that a ball of twine appears as a point when viewed from far away (0-dimensional), a ball when viewed from fairly near (3-dimensional), or a curved strand (1-dimensional), he argued that the dimensions of an object are relative to the observer and may be fractional. An object whose irregularity is constant over different scales (“self-similarity”) is a fractal (examples include the Menger sponge, the Sierpiński gasket, and the Koch curve or snowflake, which is infinitely long yet encloses a finite space and has a fractal dimension of circa 1.2619). In 1982, Mandelbrot published The Fractal Geometry of Nature, which became a classic of chaos theory.
In December 1977, the New York Academy of Sciences organized the first symposium on chaos, attended by David Ruelle, Robert May, James A. Yorke (coiner of the term “chaos” as used in mathematics), Robert Shaw, and the meteorologist Edward Lorenz. The following year Pierre Coullet and Charles Tresser published “Itérations d’endomorphismes et groupe de renormalisation”, and Mitchell Feigenbaum‘s article “Quantitative Universality for a Class of Nonlinear Transformations” finally appeared in a journal, after 3 years of referee rejections. Thus Feigenbaum (1975) and Coullet & Tresser (1978) discovered the universality in chaos, permitting the application of chaos theory to many different phenomena.
In 1979, Albert J. Libchaber, during a symposium organized in Aspen by Pierre Hohenberg, presented his experimental observation of the bifurcation cascade that leads to chaos and turbulence in Rayleigh–Bénard convection systems. He was awarded the Wolf Prize in Physics in 1986 along with Mitchell J. Feigenbaum for their inspiring achievements.
In 1986, the New York Academy of Sciences co-organized with the National Institute of Mental Health and the Office of Naval Research the first important conference on chaos in biology and medicine. There, Bernardo Huberman presented a mathematical model of the eye tracking dysfunction among people with schizophrenia. This led to a renewal of physiology in the 1980s through the application of chaos theory, for example, in the study of pathological cardiac cycles.
In 1987, Per Bak, Chao Tang and Kurt Wiesenfeld published a paper in Physical Review Letters describing for the first time self-organized criticality (SOC), considered one of the mechanisms by which complexity arises in nature.
Alongside largely lab-based approaches such as the Bak–Tang–Wiesenfeld sandpile, many other investigations have focused on large-scale natural or social systems that are known (or suspected) to display scale-invariant behavior. Although these approaches were not always welcomed (at least initially) by specialists in the subjects examined, SOC has nevertheless become established as a strong candidate for explaining a number of natural phenomena, including earthquakes, (which, long before SOC was discovered, were known as a source of scale-invariant behavior such as the Gutenberg–Richter law describing the statistical distribution of earthquake sizes, and the Omori law describing the frequency of aftershocks), solar flares, fluctuations in economic systems such as financial markets (references to SOC are common in econophysics), landscape formation, forest fires, landslides, epidemics, and biological evolution (where SOC has been invoked, for example, as the dynamical mechanism behind the theory of “punctuated equilibria” put forward by Niles Eldredge and Stephen Jay Gould). Given the implications of a scale-free distribution of event sizes, some researchers have suggested that another phenomenon that should be considered an example of SOC is the occurrence of wars. These investigations of SOC have included both attempts at modelling (either developing new models or adapting existing ones to the specifics of a given natural system), and extensive data analysis to determine the existence and/or characteristics of natural scaling laws.
Also in 1987 James Gleick published Chaos: Making a New Science, which became a best-seller and introduced the general principles of chaos theory as well as its history to the broad public.[90] Initially the domain of a few, isolated individuals, chaos theory progressively emerged as a transdisciplinary and institutional discipline, mainly under the name of nonlinear systems analysis. Alluding to Thomas Kuhn‘s concept of a paradigm shift exposed in The Structure of Scientific Revolutions (1962), many “chaologists” (as some described themselves) claimed that this new theory was an example of such a shift, a thesis upheld by Gleick.
The availability of cheaper, more powerful computers broadens the applicability of chaos theory. Currently, chaos theory remains an active area of research, involving many different disciplines such as mathematics, topology, physics,social systems,population modeling, biology, meteorology, astrophysics, information theory, computational neuroscience, pandemiccrisis management, etc.
Lorenz’s pioneering contributions to chaotic modeling
Throughout his career, Professor Edward Lorenz authored a total of 61 research papers, out of which 58 were solely authored by him. Commencing with the 1960 conference in Japan, Lorenz embarked on a journey of developing diverse models aimed at uncovering the SDIC and chaotic features. A recent review of Lorenz’s model progression spanning from 1960 to 2008 revealed his adeptness at employing varied physical systems to illustrate chaotic phenomena. These systems encompassed Quasi-geostrophic systems, the Conservative Vorticity Equation, the Rayleigh-Bénard Convection Equations, and the Shallow Water Equations. Moreover, Lorenz can be credited with the early application of the logistic map to explore chaotic solutions, a milestone he achieved ahead of his colleagues (e.g. Lorenz 1964).
In 1972, Lorenz coined the term “butterfly effect” as a metaphor to discuss whether a small perturbation could eventually create a tornado with a three-dimensional, organized, and coherent structure. While connected to the original butterfly effect based on sensitive dependence on initial conditions, its metaphorical variant carries distinct nuances. To commemorate this milestone, a reprint book containing invited papers that deepen our understanding of both butterfly effects was officially published to celebrate the 50th anniversary of the metaphorical butterfly effect.
A popular but inaccurate analogy for chaos
The sensitive dependence on initial conditions (i.e., butterfly effect) has been illustrated using the following folklore:
For want of a nail, the shoe was lost.
For want of a shoe, the horse was lost.
For want of a horse, the rider was lost.
For want of a rider, the battle was lost.
For want of a battle, the kingdom was lost.
And all for the want of a horseshoe nail.
Based on the above, many people mistakenly believe that the impact of a tiny initial perturbation monotonically increases with time and that any tiny perturbation can eventually produce a large impact on numerical integrations. However, in 2008, Lorenz stated that he did not feel that this verse described true chaos but that it better illustrated the simpler phenomenon of instability and that the verse implicitly suggests that subsequent small events will not reverse the outcome. Based on the analysis, the verse only indicates divergence, not boundedness. Boundedness is important for the finite size of a butterfly pattern. In a recent study, the characteristic of the aforementioned verse was recently denoted as “finite-time sensitive dependence”.
Main article: Chaotic cryptology
Chaos theory has been used for many years in cryptography. In the past few decades, chaos and nonlinear dynamics have been used in the design of hundreds of cryptographic primitives. These algorithms include image encryption algorithms, hash functions, secure pseudo-random number generators, stream ciphers, watermarking, and steganography.[119] The majority of these algorithms are based on uni-modal chaotic maps and a big portion of these algorithms use the control parameters and the initial condition of the chaotic maps as their keys. From a wider perspective, without loss of generality, the similarities between the chaotic maps and the cryptographic systems is the main motivation for the design of chaos based cryptographic algorithms. One type of encryption, secret key or symmetric key, relies on diffusion and confusion, which is modeled well by chaos theory. Another type of computing, DNA computing, when paired with chaos theory, offers a way to encrypt images and other information. Many of the DNA-Chaos cryptographic algorithms are proven to be either not secure, or the technique applied is suggested to be not efficient.
Robotics
Robotics is another area that has recently benefited from chaos theory. Instead of robots acting in a trial-and-error type of refinement to interact with their environment, chaos theory has been used to build a predictive model. Chaotic dynamics have been exhibited by passive walking biped robots.
Biology
For over a hundred years, biologists have been keeping track of populations of different species with population models. Most models are continuous, but recently scientists have been able to implement chaotic models in certain populations. For example, a study on models of Canadian lynx showed there was chaotic behavior in the population growth. Chaos can also be found in ecological systems, such as hydrology. While a chaotic model for hydrology has its shortcomings, there is still much to learn from looking at the data through the lens of chaos theory. Another biological application is found in cardiotocography. Fetal surveillance is a delicate balance of obtaining accurate information while being as noninvasive as possible. Better models of warning signs of fetal hypoxia can be obtained through chaotic modeling.
As Perry points out, modeling of chaotic time series in ecology is helped by constraint. There is always potential difficulty in distinguishing real chaos from chaos that is only in the model. Hence both constraint in the model and or duplicate time series data for comparison will be helpful in constraining the model to something close to the reality, for example Perry & Wall 1984. Gene-for-gene co-evolution sometimes shows chaotic dynamics in allele frequencies. Adding variables exaggerates this: Chaos is more common in models incorporating additional variables to reflect additional facets of real populations.Robert M. May himself did some of these foundational crop co-evolution studies, and this in turn helped shape the entire field. Even for a steady environment, merely combining one crop and one pathogen may result in quasi-periodic- or chaotic- oscillations in pathogen population.
Economics
It is possible that economic models can also be improved through an application of chaos theory, but predicting the health of an economic system and what factors influence it most is an extremely complex task. Economic and financial systems are fundamentally different from those in the classical natural sciences since the former are inherently stochastic in nature, as they result from the interactions of people, and thus pure deterministic models are unlikely to provide accurate representations of the data. The empirical literature that tests for chaos in economics and finance presents very mixed results, in part due to confusion between specific tests for chaos and more general tests for non-linear relationships.
Chaos could be found in economics by the means of recurrence quantification analysis. In fact, Orlando et al. by the means of the so-called recurrence quantification correlation index were able detect hidden changes in time series. Then, the same technique was employed to detect transitions from laminar (regular) to turbulent (chaotic) phases as well as differences between macroeconomic variables and highlight hidden features of economic dynamics. Finally, chaos theory could help in modeling how an economy operates as well as in embedding shocks due to external events such as COVID-19.
Finite predictability in weather and climate
Due to the sensitive dependence of solutions on initial conditions (SDIC), also known as the butterfly effect, chaotic systems like the Lorenz 1963 model imply a finite predictability horizon. This means that while accurate predictions are possible over a finite time period, they are not feasible over an infinite time span. Considering the nature of Lorenz’s chaotic solutions, the committee led by Charney et al. in 1966 extrapolated a doubling time of five days from a general circulation model, suggesting a predictability limit of two weeks. This connection between the five-day doubling time and the two-week predictability limit was also recorded in a 1969 report by the Global Atmospheric Research Program (GARP). To acknowledge the combined direct and indirect influences from the Mintz and Arakawa model and Lorenz’s models, as well as the leadership of Charney et al., Shen et al. refer to the two-week predictability limit as the “Predictability Limit Hypothesis,” drawing an analogy to Moore’s Law.
AI-extended modeling framework
In AI-driven large language models, responses can exhibit sensitivities to factors like alterations in formatting and variations in prompts. These sensitivities are akin to butterfly effects. Although classifying AI-powered large language models as classical deterministic chaotic systems poses challenges, chaos-inspired approaches and techniques (such as ensemble modeling) may be employed to extract reliable information from these expansive language models (see also “Butterfly Effect in Popular Culture“).
Other areas
In chemistry, predicting gas solubility is essential to manufacturing polymers, but models using particle swarm optimization (PSO) tend to converge to the wrong points. An improved version of PSO has been created by introducing chaos, which keeps the simulations from getting stuck.[144] In celestial mechanics, especially when observing asteroids, applying chaos theory leads to better predictions about when these objects will approach Earth and other planets.[145] Four of the five moons of Pluto rotate chaotically. In quantum physics and electrical engineering, the study of large arrays of Josephson junctions benefitted greatly from chaos theory. Closer to home, coal mines have always been dangerous places where frequent natural gas leaks cause many deaths. Until recently, there was no reliable way to predict when they would occur. But these gas leaks have chaotic tendencies that, when properly modeled, can be predicted fairly accurately.
Chaos theory can be applied outside of the natural sciences, but historically nearly all such studies have suffered from lack of reproducibility; poor external validity; and/or inattention to cross-validation, resulting in poor predictive accuracy (if out-of-sample prediction has even been attempted). Glass and Mandell and Selz have found that no EEG study has as yet indicated the presence of strange attractors or other signs of chaotic behavior.
Redington and Reidbord (1992) attempted to demonstrate that the human heart could display chaotic traits. They monitored the changes in between-heartbeat intervals for a single psychotherapy patient as she moved through periods of varying emotional intensity during a therapy session. Results were admittedly inconclusive. Not only were there ambiguities in the various plots the authors produced to purportedly show evidence of chaotic dynamics (spectral analysis, phase trajectory, and autocorrelation plots), but also when they attempted to compute a Lyapunov exponent as more definitive confirmation of chaotic behavior, the authors found they could not reliably do so.
In their 1995 paper, Metcalf and Allen maintained that they uncovered in animal behavior a pattern of period doubling leading to chaos. The authors examined a well-known response called schedule-induced polydipsia, by which an animal deprived of food for certain lengths of time will drink unusual amounts of water when the food is at last presented. The control parameter (r) operating here was the length of the interval between feedings, once resumed. The authors were careful to test a large number of animals and to include many replications, and they designed their experiment so as to rule out the likelihood that changes in response patterns were caused by different starting places for r.
Time series and first delay plots provide the best support for the claims made, showing a fairly clear march from periodicity to irregularity as the feeding times were increased. The various phase trajectory plots and spectral analyses, on the other hand, do not match up well enough with the other graphs or with the overall theory to lead inexorably to a chaotic diagnosis. For example, the phase trajectories do not show a definite progression towards greater and greater complexity (and away from periodicity); the process seems quite muddied. Also, where Metcalf and Allen saw periods of two and six in their spectral plots, there is room for alternative interpretations. All of this ambiguity necessitate some serpentine, post-hoc explanation to show that results fit a chaotic model.
By adapting a model of career counseling to include a chaotic interpretation of the relationship between employees and the job market, Amundson and Bright found that better suggestions can be made to people struggling with career decisions. Modern organizations are increasingly seen as open complex adaptive systems with fundamental natural nonlinear structures, subject to internal and external forces that may contribute chaos. For instance, team building and group development is increasingly being researched as an inherently unpredictable system, as the uncertainty of different individuals meeting for the first time makes the trajectory of the team unknowable.
Traffic forecasting may benefit from applications of chaos theory. Better predictions of when a congestion will occur would allow measures to be taken to disperse it before it would have occurred. Combining chaos theory principles with a few other methods has led to a more accurate short-term prediction model (see the plot of the BML traffic model at right).
Chaos theory has been applied to environmental water cycle data (also hydrological data), such as rainfall and streamflow. These studies have yielded controversial results, because the methods for detecting a chaotic signature are often relatively subjective. Early studies tended to “succeed” in finding chaos, whereas subsequent studies and meta-analyses called those studies into question and provided explanations for why these datasets are not likely to have low-dimension chaotic dynamics.
In the mathematical field of dynamical systems, an attractor is a set of states toward which a system tends to evolve,[2] for a wide variety of starting conditions of the system. System values that get close enough to the attractor values remain close even if slightly disturbed.
In finite-dimensional systems, the evolving variable may be represented algebraically as an n-dimensional vector. The attractor is a region in n-dimensional space. In physical systems, the n dimensions may be, for example, two or three positional coordinates for each of one or more physical entities; in economic systems, they may be separate variables such as the inflation rate and the unemployment rate.[not verified in body]
If the evolving variable is two- or three-dimensional, the attractor of the dynamic process can be represented geometrically in two or three dimensions, (as for example in the three-dimensional case depicted to the right). An attractor can be a point, a finite set of points, a curve, a manifold, or even a complicated set with a fractal structure known as a strange attractor (see strange attractor below). If the variable is a scalar, the attractor is a subset of the real number line. Describing the attractors of chaotic dynamical systems has been one of the achievements of chaos theory.
A trajectory of the dynamical system in the attractor does not have to satisfy any special constraints except for remaining on the attractor, forward in time. The trajectory may be periodic or chaotic. If a set of points is periodic or chaotic, but the flow in the neighborhood is away from the set, the set is not an attractor, but instead is called a repeller (or repellor).
Motivation of attractors
[edit]
A dynamical system is generally described by one or more differential or difference equations. The equations of a given dynamical system specify its behavior over any given short period of time. To determine the system’s behavior for a longer period, it is often necessary to integrate the equations, either through analytical means or through iteration, often with the aid of computers.
Dynamical systems in the physical world tend to arise from dissipative systems: if it were not for some driving force, the motion would cease. (Dissipation may come from internal friction, thermodynamic losses, or loss of material, among many causes.) The dissipation and the driving force tend to balance, killing off initial transients and settle the system into its typical behavior. The subset of the phase space of the dynamical system corresponding to the typical behavior is the attractor, also known as the attracting section or attractee.
Invariant sets and limit sets are similar to the attractor concept. An invariant set is a set that evolves to itself under the dynamics.[3] Attractors may contain invariant sets. A limit set is a set of points such that there exists some initial state that ends up arbitrarily close to the limit set (i.e. to each point of the set) as time goes to infinity. Attractors are limit sets, but not all limit sets are attractors: It is possible to have some points of a system converge to a limit set, but different points when perturbed slightly off the limit set may get knocked off and never return to the vicinity of the limit set.
For example, the dampedpendulum has two invariant points: the point x0 of minimum height and the point x1 of maximum height. The point x0 is also a limit set, as trajectories converge to it; the point x1 is not a limit set. Because of the dissipation due to air resistance, the point x0 is also an attractor. If there was no dissipation, x0 would not be an attractor. Aristotle believed that objects moved only as long as they were pushed, which is an early formulation of a dissipative attractor.
Some attractors are known to be chaotic (see strange attractor), in which case the evolution of any two distinct points of the attractor result in exponentially diverging trajectories, which complicates prediction when even the smallest noise is present in the system.[4]
Mathematical definition
[edit]
Let t represent time and let f(t,⋅) be a function which specifies the dynamics of the system. That is, if a is a point in an n-dimensional phase space, representing the initial state of the system, then f(0,a)=a and, for a positive value of t, f(t,a) is the result of the evolution of this state after t units of time. For example, if the system describes the evolution of a free particle in one dimension then the phase space is the plane R2 with coordinates (x,v), where x is the position of the particle, v is its velocity, a=(x,v), and the evolution is given by
Attracting period-3 cycle and its immediate basin of attraction for a certain parametrization of the Julia set, which iterates the function f(z) = z2 + c. The three darkest points are the points of the 3-cycle, which lead to each other in sequence, and iteration from any point in the basin of attraction leads to (usually asymptotic) convergence to this sequence of three points.
f(t,(x,v))=(x+tv,v).
An attractor is a subset A of the phase space characterized by the following three conditions:
A is forward invariant under f: if a is an element of A then so is f(t,a), for all t>0.
There exists a neighborhood of A, called the basin of attraction for A and denoted B(A), which consists of all points b that “enter” A in the limit t→∞. More formally, B(A) is the set of all points b in the phase space with the following property:
For any open neighborhood N of A, there is a positive constant T such that f(t,b)∈N for all real t>T.
There is no proper (non-empty) subset of A having the first two properties.
Since the basin of attraction contains an open set containing A, every point that is sufficiently close to A is attracted to A. The definition of an attractor uses a metric on the phase space, but the resulting notion usually depends only on the topology of the phase space. In the case of Rn, the Euclidean norm is typically used.
Many other definitions of attractor occur in the literature. For example, some authors require that an attractor have positive measure (preventing a point from being an attractor), others relax the requirement that B(A) be a neighborhood.[5]
[edit]
Weakly attracting fixed point for a complex number evolving according to a complex quadratic polynomial. The phase space is the horizontal complex plane; the vertical axis measures the frequency with which points in the complex plane are visited. The point in the complex plane directly below the peak frequency is the fixed point attractor.
A fixed point of a function or transformation is a point that is mapped to itself by the function or transformation. If we regard the evolution of a dynamical system as a series of transformations, then there may or may not be a point which remains fixed under each transformation. The final state that a dynamical system evolves towards corresponds to an attracting fixed point of the evolution function for that system, such as the center bottom position of a dampedpendulum, the level and flat water line of sloshing water in a glass, or the bottom center of a bowl containing a rolling marble. But the fixed point(s) of a dynamic system is not necessarily an attractor of the system. For example, if the bowl containing a rolling marble was inverted and the marble was balanced on top of the bowl, the center bottom (now top) of the bowl is a fixed state, but not an attractor. This is equivalent to the difference between stable and unstable equilibria. In the case of a marble on top of an inverted bowl (a hill), that point at the top of the bowl (hill) is a fixed point (equilibrium), but not an attractor (unstable equilibrium).
In addition, physical dynamic systems with at least one fixed point invariably have multiple fixed points and attractors due to the reality of dynamics in the physical world, including the nonlinear dynamics of stiction, friction, surface roughness, deformation (both elastic and plasticity), and even quantum mechanics.[6] In the case of a marble on top of an inverted bowl, even if the bowl seems perfectly hemispherical, and the marble’s spherical shape, are both much more complex surfaces when examined under a microscope, and their shapes change or deform during contact. Any physical surface can be seen to have a rough terrain of multiple peaks, valleys, saddle points, ridges, ravines, and plains.[7] There are many points in this surface terrain (and the dynamic system of a similarly rough marble rolling around on this microscopic terrain) that are considered stationary or fixed points, some of which are categorized as attractors.
Finite number of points
[edit]
In a discrete-time system, an attractor can take the form of a finite number of points that are visited in sequence. Each of these points is called a periodic point. This is illustrated by the logistic map, which depending on its specific parameter value can have an attractor consisting of 1 point, 2 points, 2n points, 3 points, 3×2n points, 4 points, 5 points, or any given positive integer number of points.
Limit cycle
[edit]Main article: Limit cycle
A limit cycle is a periodic orbit of a continuous dynamical system that is isolated. It concerns a cyclic attractor. Examples include the swings of a pendulum clock, and the heartbeat while resting. The limit cycle of an ideal pendulum is not an example of a limit cycle attractor because its orbits are not isolated: in the phase space of the ideal pendulum, near any point of a periodic orbit there is another point that belongs to a different periodic orbit, so the former orbit is not attracting. For a physical pendulum under friction, the resting state will be a fixed-point attractor. The difference with the clock pendulum is that there, energy is injected by the escapement mechanism to maintain the cycle.
Van der Polphase portrait: an attracting limit cycle
Limit torus
[edit]
There may be more than one frequency in the periodic trajectory of the system through the state of a limit cycle. For example, in physics, one frequency may dictate the rate at which a planet orbits a star while a second frequency describes the oscillations in the distance between the two bodies. If two of these frequencies form an irrational fraction (i.e. they are incommensurate), the trajectory is no longer closed, and the limit cycle becomes a limit torus. This kind of attractor is called an Nt -torus if there are Nt incommensurate frequencies. For example, here is a 2-torus:
A time series corresponding to this attractor is a quasiperiodic series: A discretely sampled sum of Nt periodic functions (not necessarily sine waves) with incommensurate frequencies. Such a time series does not have a strict periodicity, but its power spectrum still consists only of sharp lines.[citation needed]
Strange attractor
[edit]“Strange attractor” redirects here. For other uses, see Strange Attractor (disambiguation).
A plot of Lorenz’s strange attractor for values ρ = 28, σ = 10, β = 8/3
An attractor is called strange if it has a fractal structure, that is if it has non-integer Hausdorff dimension. This is often the case when the dynamics on it are chaotic, but strange nonchaotic attractors also exist. If a strange attractor is chaotic, exhibiting sensitive dependence on initial conditions, then any two arbitrarily close alternative initial points on the attractor, after any of various numbers of iterations, will lead to points that are arbitrarily far apart (subject to the confines of the attractor), and after any of various other numbers of iterations will lead to points that are arbitrarily close together. Thus a dynamic system with a chaotic attractor is locally unstable yet globally stable: once some sequences have entered the attractor, nearby points diverge from one another but never depart from the attractor.[8]
The term strange attractor was coined by David Ruelle and Floris Takens to describe the attractor resulting from a series of bifurcations of a system describing fluid flow.[9] Strange attractors are often differentiable in a few directions, but some are like a Cantor dust, and therefore not differentiable. Strange attractors may also be found in the presence of noise, where they may be shown to support invariant random probability measures of Sinai–Ruelle–Bowen type.[10]
Examples of strange attractors include the double-scroll attractor, Hénon attractor, Rössler attractor, and Lorenz attractor.
Attractors characterize the evolution of a system
[edit]
Bifurcation diagram of the logistic map. The attractor(s) for any value of the parameter r are shown on the ordinate in the domain 0<x<1. The colour of a point indicates how often the point (r,x) is visited over the course of 106 iterations: frequently encountered values are coloured in blue, less frequently encountered values are yellow. A bifurcation appears around r≈3.0, a second bifurcation (leading to four attractor values) around r≈3.5. The behaviour is increasingly complicated for r>3.6, interspersed with regions of simpler behaviour (white stripes).
The parameters of a dynamic equation evolve as the equation is iterated, and the specific values may depend on the starting parameters. An example is the well-studied logistic map, xn+1=rxn(1−xn), whose basins of attraction for various values of the parameter r are shown in the figure. If r=2.6, all starting x values of x<0 will rapidly lead to function values that go to negative infinity; starting x values of x>1 will also go to negative infinity. But for 0<x<1 the x values rapidly converge to x≈0.615, i.e. at this value of r, a single value of x is an attractor for the function’s behaviour. For other values of r, more than one value of x may be visited: if r is 3.2, starting values of 0<x<1 will lead to function values that alternate between x≈0.513 and x≈0.799. At some values of r, the attractor is a single point (a “fixed point”), at other values of r two values of x are visited in turn (a period-doubling bifurcation), or, as a result of further doubling, any number k×2n values of x; at yet other values of r, any given number of values of x are visited in turn; finally, for some values of r, an infinitude of points are visited. Thus one and the same dynamic equation can have various types of attractors, depending on its parameters.
Basins of attraction
[edit]
An attractor’s basin of attraction is the region of the phase space, over which iterations are defined, such that any point (any initial condition) in that region will asymptotically be iterated into the attractor. For a stablelinear system, every point in the phase space is in the basin of attraction. However, in nonlinear systems, some points may map directly or asymptotically to infinity, while other points may lie in a different basin of attraction and map asymptotically into a different attractor; other initial conditions may be in or map directly into a non-attracting point or cycle.[11]
Linear equation or system
[edit]
An univariate linear homogeneous difference equation xt=axt−1 diverges to infinity if |a|>1 from all initial points except 0; there is no attractor and therefore no basin of attraction. But if |a|<1 all points on the number line map asymptotically (or directly in the case of 0) to 0; 0 is the attractor, and the entire number line is the basin of attraction.
Likewise, a linear matrix difference equation in a dynamic vector X, of the homogeneous form Xt=AXt−1 in terms of square matrix A will have all elements of the dynamic vector diverge to infinity if the largest eigenvalues of A is greater than 1 in absolute value; there is no attractor and no basin of attraction. But if the largest eigenvalue is less than 1 in magnitude, all initial vectors will asymptotically converge to the zero vector, which is the attractor; the entire n-dimensional space of potential initial vectors is the basin of attraction.
Similar features apply to linear differential equations. The scalar equation dx/dt=ax causes all initial values of x except zero to diverge to infinity if a>0 but to converge to an attractor at the value 0 if a<0, making the entire number line the basin of attraction for 0. And the matrix system dX/dt=AX gives divergence from all initial points except the vector of zeroes if any eigenvalue of the matrix A is positive; but if all the eigenvalues are negative the vector of zeroes is an attractor whose basin of attraction is the entire phase space.
Nonlinear equation or system
[edit]
Equations or systems that are nonlinear can give rise to a richer variety of behavior than can linear systems. One example is Newton’s method of iterating to a root of a nonlinear expression. If the expression has more than one real root, some starting points for the iterative algorithm will lead to one of the roots asymptotically, and other starting points will lead to another. The basins of attraction for the expression’s roots are generally not simple—it is not simply that the points nearest one root all map there, giving a basin of attraction consisting of nearby points. The basins of attraction can be infinite in number and arbitrarily small. For example,[12] for the function f(x)=x3−2×2−11x+12, the following initial conditions are in successive basins of attraction:
A Newton fractal showing basins of attraction in the complex plane for using Newton’s method to solve x5 − 1 = 0. Points in like-colored regions map to the same root; darker means more iterations are needed to converge.
2.35287527 converges to 4;
2.35284172 converges to −3;
2.35283735 converges to 4;
2.352836327 converges to −3;
2.352836323 converges to 1.
Newton’s method can also be applied to complex functions to find their roots. Each root has a basin of attraction in the complex plane; these basins can be mapped as in the image shown. As can be seen, the combined basin of attraction for a particular root can have many disconnected regions. For many complex functions, the boundaries of the basins of attraction are fractals.
Partial differential equations
[edit]
Parabolic partial differential equations may have finite-dimensional attractors. The diffusive part of the equation damps higher frequencies and in some cases leads to a global attractor. The Ginzburg–Landau, the Kuramoto–Sivashinsky, and the two-dimensional, forced Navier–Stokes equations are all known to have global attractors of finite dimension.
For the three-dimensional, incompressible Navier–Stokes equation with periodic boundary conditions, if it has a global attractor, then this attractor will be of finite dimensions.[13]
See also
[edit]Wikimedia Commons has media related to Attractor.
Feigenbaum originally related the first constant to the period-doubling bifurcations in the logistic map, but also showed it to hold for all one-dimensionalmaps with a single quadraticmaximum. As a consequence of this generality, every chaotic system that corresponds to this description will bifurcate at the same rate. Feigenbaum made this discovery in 1975, and he officially published it in 1978.
The first constant
The first Feigenbaum constant or simply Feigenbaum constant δ is the limiting ratio of each bifurcation interval to the next between every period doubling, of a one-parameter map
where f (x) is a function parameterized by the bifurcation parameter a.
It is given by the limit:
where an are discrete values of a at the nth period doubling.
This gives its numerical value: (sequence A006890 in the OEIS)
A simple rational approximation is: 621/133, which is correct to 5 significant values (when rounding). For more precision use 1228/263, which is correct to 7 significant values.
Is approximately equal to 10/π − 1, with an error of 0.0047%
Illustration
Non-linear maps
To see how this number arises, consider the real one-parameter map
Here a is the bifurcation parameter, x is the variable. The values of a for which the period doubles (e.g. the largest value for a with no period-2 orbit, or the largest a with no period-4 orbit), are a1, a2 etc. These are tabulated below:
n
Period
Bifurcation parameter (an)
Ratio an−1 − an−2/an − an−1
1
2
0.75
—
2
4
1.25
—
3
8
1.3680989
4.2337
4
16
1.3940462
4.5515
5
32
1.3996312
4.6458
6
64
1.4008286
4.6639
7
128
1.4010853
4.6682
8
256
1.4011402
4.6689
The ratio in the last column converges to the first Feigenbaum constant. The same number arises for the logistic map
with real parameter a and variable x. Tabulating the bifurcation values again:
n
Period
Bifurcation parameter (an)
Ratio an−1 − an−2/an − an−1
1
2
3
—
2
4
3.4494897
—
3
8
3.5440903
4.7514
4
16
3.5644073
4.6562
5
32
3.5687594
4.6683
6
64
3.5696916
4.6686
7
128
3.5698913
4.6680
8
256
3.5699340
4.6768
Fractals
Self-similarity in the Mandelbrot set shown by zooming in on a round feature while panning in the negative-x direction. The display center pans from (−1, 0) to (−1.31, 0) while the view magnifies from 0.5 × 0.5 to 0.12 × 0.12 to approximate the Feigenbaum ratio.
In the case of the Mandelbrot set for complex quadratic polynomial
f(z)=z2+c
the Feigenbaum constant is the limiting ratio between the diameters of successive circles on the real axis in the complex plane (see animation on the right).
n
Period = 2n
Bifurcation parameter (cn)
Ratio =cn−1−cn−2cn−cn−1
1
2
−0.75
—
2
4
−1.25
—
3
8
−1.3680989
4.2337
4
16
−1.3940462
4.5515
5
32
−1.3996312
4.6459
6
64
−1.4008287
4.6639
7
128
−1.4010853
4.6668
8
256
−1.4011402
4.6740
9
512
−1.401151982029
4.6596
10
1024
−1.401154502237
4.6750
…
…
…
…
∞
−1.4011551890…
Bifurcation parameter is a root point of period-2n component. This series converges to the Feigenbaum point c = −1.401155…… The ratio in the last column converges to the first Feigenbaum constant.
Julia set for the Feigenbaum point
Other maps also reproduce this ratio; in this sense the Feigenbaum constant in bifurcation theory is analogous to π in geometry and e in calculus.
The second constant
The second Feigenbaum constant or Feigenbaum reduction parameter α is given by: (sequence A006891 in the OEIS)
It is the ratio between the width of a tine and the width of one of its two subtines (except the tine closest to the fold). A negative sign is applied to α when the ratio between the lower subtine and the width of the tine is measured.
These numbers apply to a large class of dynamical systems (for example, dripping faucets to population growth).
A simple rational approximation is 13/11 × 17/11 × 37/27 = 8177/3267.
Properties
Both numbers are believed to be transcendental, although they have not been proven to be so. In fact, there is no known proof that either constant is even irrational.
The first proof of the universality of the Feigenbaum constants was carried out by Oscar Lanford—with computer-assistance—in 1982 (with a small correction by Jean-Pierre Eckmann and Peter Wittwer of the University of Geneva in 1987). Over the years, non-numerical methods were discovered for different parts of the proof, aiding Mikhail Lyubich in producing the first complete non-numerical proof.
Other values
The period-3 window in the logistic map also has a period-doubling route to chaos, reaching chaos at , and it has its own two Feigenbaum constants: .
we have a function , and we want to study what happens when we iterate the map many times. The map might fall into a fixed point, a fixed cycle, or chaos. When the map falls into a stable fixed cycle of length n, we would find that the graph of frn and the graph of x↦x intersects at n points, and the slope of the graph of frn is bounded in at those intersections.
For example, when 0, we have a single intersection, with slope bounded in , indicating that it is a stable single fixed point.
As r increases to beyond , the intersection point splits to two, which is a period doubling. For example, when , there are three intersection points, with the middle one unstable, and the two others stable.
As r approaches , another period-doubling occurs in the same way. The period-doublings occur more and more frequently, until at a certain , the period doublings become infinite, and the map becomes chaotic. This is the period-doubling route to chaos.
Relationship between and xn when . Before the period doubling bifurcation occurs. The orbit converges to the fixed point .
Relationship between and xn when . The tangent slope at the fixed point xf2. is exactly 1, and a period doubling bifurcation occurs.
Relationship between and xn when.3. The fixed point xf2 becomes unstable, splitting into a periodic-2 stable cycle.
When , we have a single intersection, with slope exactly +1, indicating that it is about to undergo a period-doubling.
When , there are three intersection points, with the middle one unstable, and the two others stable.
When , there are three intersection points, with the middle one unstable, and the two others having slope exactly +1, indicating that it is about to undergo another period-doubling.
When r≈3.56994567, there are infinitely many intersections, and we have arrived at chaos via the period-doubling route.
Approach to the scaling limit as r approaches r∗=3.5699⋯ from below.At the point of chaos r∗=3.5699⋯, as we repeat the period-doublingsfr∗1,fr∗2,fr∗4,fr∗8,fr∗16,…, the graphs seem to resemble each other, except that they are shrunken towards the middle, and rotated by 180 degrees, converging to a fractal.
Looking at the images, one can notice that at the point of chaos r∗=3.5699⋯, the curve of fr∗∞ looks like a fractal. Furthermore, as we repeat the period-doublingsfr∗1,fr∗2,fr∗4,fr∗8,fr∗16,…, the graphs seem to resemble each other, except that they are shrunken towards the middle, and rotated by 180 degrees.
This suggests to us a scaling limit: if we repeatedly double the function, then scale it up by α for a certain constant α:f(x)↦−αf(f(−x/α))then at the limit, we would end up with a function g that satisfies g(x)=−αg(g(−x/α)). Further, as the period-doubling intervals become shorter and shorter, the ratio between two period-doubling intervals converges to a limit, the first Feigenbaum constant δ=4.6692016⋯.
Duration: 3 seconds.0:03
For the wrong values of scaling factor α, the map does not converge to a limit, but when α=2.5029…, it converges.At the point of chaos r∗=3.5699⋯, as we repeat the functional equation iteration f(x)↦−αf(f(−x/α)) with α=2.5029…, we find that the map does converge to a limit.
The constant α can be numerically found by trying many possible values. For the wrong values, the map does not converge to a limit, but when it is α=2.5029…, it converges. This is the second Feigenbaum constant.
Chaotic regime
[edit]
In the chaotic regime, fr∞, the limit of the iterates of the map, becomes chaotic dark bands interspersed with non-chaotic bright bands.
In the chaotic regime, fr∞, the limit of the iterates of the map, becomes chaotic dark bands interspersed with non-chaotic bright bands.
Other scaling limits
[edit]
When r approaches r≈3.8494344, we have another period-doubling approach to chaos, but this time with periods 3, 6, 12, … This again has the same Feigenbaum constants δ,α. The limit of f(x)↦−αf(f(−x/α)) is also the same function. This is an example of universality.
Duration: 12 seconds.0:12
Logistic map approaching the period-doubling chaos scaling limit r∗=3.84943… from below. At the limit, this has the same shape as that of r∗=3.5699⋯, since all period-doubling routes to chaos are the same (universality).
We can also consider period-tripling route to chaos by picking a sequence of r1,r2,… such that rn is the lowest value in the period-3n window of the bifurcation diagram. For example, we have r1=3.8284,r2=3.85361,…, with the limit r∞=3.854077963…. This has a different pair of Feigenbaum constants δ=55.26…,α=9.277….[2] And fr∞converges to the fixed point tof(x)↦−αf(f(f(−x/α)))As another example, period-4-pling has a pair of Feigenbaum constants distinct from that of period-doubling, even though period-4-pling is reached by two period-doublings. In detail, define r1,r2,… such that rn is the lowest value in the period-4n window of the bifurcation diagram. Then we have r1=3.960102,r2=3.9615554,…, with the limit r∞=3.96155658717…. This has a different pair of Feigenbaum constants δ=981.6…,α=38.82….
In general, each period-multiplying route to chaos has its own pair of Feigenbaum constants. In fact, there are typically more than one. For example, for period-7-pling, there are at least 9 different pairs of Feigenbaum constants.[2]
Generally, 3δ≈2α2, and the relation becomes exact as both numbers increase to infinity: limδ/α2=2/3.
Feigenbaum-Cvitanović functional equation
[edit]
This functional equation arises in the study of one-dimensional maps that, as a function of a parameter, go through a period-doubling cascade. Discovered by Mitchell Feigenbaum and Predrag Cvitanović,[3] the equation is the mathematical expression of the universality of period doubling. It specifies a function g and a parameter α by the relation
g(x)=−αg(g(−x/α))
with the initial conditions{g(0)=1,g′(0)=0,g″(0)<0.For a particular form of solution with a quadratic dependence of the solution near x = 0, α = 2.5029… is one of the Feigenbaum constants.
The power series of g is approximately[4]g(x)=1−1.52763×2+0.104815×4+0.026705×6+O(x8)
Renormalization
[edit]
The Feigenbaum function can be derived by a renormalization argument.[5]
The Feigenbaum function satisfies[6]g(x)=limn→∞1F(2n)(0)F(2n)(xF(2n)(0))for any map on the real line F at the onset of chaos.
Scaling function
[edit]
The Feigenbaum scaling function provides a complete description of the attractor of the logistic map at the end of the period-doubling cascade. The attractor is a Cantor set, and just as the middle-third Cantor set, it can be covered by a finite set of segments, all bigger than a minimal size dn. For a fixed dn the set of segments forms a cover Δn of the attractor. The ratio of segments from two consecutive covers, Δn and Δn+1 can be arranged to approximate a function σ, the Feigenbaum scaling function.
A plot of the Lorenz attractor for values r = 28, σ = 10, b = 8/3
A metaphor for this behavior is that a butterfly flapping its wings in Brazil can cause a tornado in Texas. Small differences in initial conditions, such as those due to errors in measurements or due to rounding errors in numerical computation, can yield widely diverging outcomes for such dynamical systems, rendering long-term prediction of their behavior impossible in general.
This can happen even though these systems are deterministic, meaning that their future behavior follows a unique evolution and is fully determined by their initial conditions, with no random elements involved. In other words, the deterministic nature of these systems does not make them predictable.
An animation of a double-rod pendulum at an intermediate energy showing chaotic behavior. Starting the pendulum from a slightly different initial condition would result in a vastly different trajectory. The double-rod pendulum is one of the simplest dynamical systems with chaotic solutions.
This behavior is known as deterministic chaos, or simply chaos. The theory was summarized by Edward Lorenz as:
Chaos: When the present determines the future but the approximate present does not approximately determine the future.
Chaos theory concerns deterministic systems whose behavior can, in principle, be predicted. Chaotic systems are predictable for a while and then ‘appear’ to become random. The amount of time for which the behavior of a chaotic system can be effectively predicted depends on three things: how much uncertainty can be tolerated in the forecast, how accurately its current state can be measured, and a time scale depending on the dynamics of the system, called the Lyapunov time. Some examples of Lyapunov times are: chaotic electrical circuits, about 1 millisecond; weather systems, a few days (unproven); the inner solar system, 4 to 5 million years. In chaotic systems, the uncertainty in a forecast increases exponentially with elapsed time. Hence, mathematically, doubling the forecast time more than squares the proportional uncertainty in the forecast. This means, in practice, a meaningful prediction cannot be made over an interval of more than two or three times the Lyapunov time. When meaningful predictions cannot be made, the system appears random.
Chaotic dynamics
In common usage, “chaos” means “a state of disorder”. However, in chaos theory, the term is defined more precisely. Although no universally accepted mathematical definition of chaos exists, a commonly used definition, originally formulated by Robert L. Devaney, says that to classify a dynamical system as chaotic, it must have these properties:
The map defined by x → 4 x (1 – x) and y → (x + y)mod 1 displays sensitivity to initial x positions. Here, two series of x and y values diverge markedly over time from a tiny initial difference.
In some cases, the last two properties above have been shown to actually imply sensitivity to initial conditions. In the discrete-time case, this is true for all continuousmaps on metric spaces. In these cases, while it is often the most practically significant property, “sensitivity to initial conditions” need not be stated in the definition.
If attention is restricted to intervals, the second property implies the other two. An alternative and a generally weaker definition of chaos uses only the first two properties in the above list.
Lorenz equations used to generate plots for the y variable. The initial conditions for x and z were kept the same but those for y were changed between 1.001, 1.0001 and 1.00001. The values for , and were 45.91, 16 and 4 respectively. As can be seen from the graph, even the slightest difference in initial values causes significant changes after about 12 seconds of evolution in the three cases. This is an example of sensitive dependence on initial conditions.
Sensitivity to initial conditions means that each point in a chaotic system is arbitrarily closely approximated by other points that have significantly different future paths or trajectories. Thus, an arbitrarily small change or perturbation of the current trajectory may lead to significantly different future behavior.
Sensitivity to initial conditions is popularly known as the “butterfly effect“, so-called because of the title of a paper given by Edward Lorenz in 1972 to the American Association for the Advancement of Science in Washington, D.C., entitled Predictability: Does the Flap of a Butterfly’s Wings in Brazil set off a Tornado in Texas?. The flapping wing represents a small change in the initial condition of the system, which causes a chain of events that prevents the predictability of large-scale phenomena. Had the butterfly not flapped its wings, the trajectory of the overall system could have been vastly different.
As suggested in Lorenz’s book entitled The Essence of Chaos, published in 1993, “sensitive dependence can serve as an acceptable definition of chaos”. In the same book, Lorenz defined the butterfly effect as: “The phenomenon that a small alteration in the state of a dynamical system will cause subsequent states to differ greatly from the states that would have followed without the alteration.” The above definition is consistent with the sensitive dependence of solutions on initial conditions (SDIC). An idealized skiing model was developed to illustrate the sensitivity of time-varying paths to initial positions. A predictability horizon can be determined before the onset of SDIC (i.e., prior to significant separations of initial nearby trajectories).
A consequence of sensitivity to initial conditions is that if we start with a limited amount of information about the system (as is usually the case in practice), then beyond a certain time, the system would no longer be predictable. This is most prevalent in the case of weather, which is generally predictable only about a week ahead. This does not mean that one cannot assert anything about events far in the future—only that some restrictions on the system are present. For example, we know that the temperature of the surface of the earth will not naturally reach 100 °C (212 °F) or fall below −130 °C (−202 °F) on earth (during the current geologic era), but we cannot predict exactly which day will have the hottest temperature of the year.
In more mathematical terms, the Lyapunov exponent measures the sensitivity to initial conditions, in the form of rate of exponential divergence from the perturbed initial conditions. More specifically, given two starting trajectories in the phase space that are infinitesimally close, with initial separation , the two trajectories end up diverging at a rate given by
where t is the time and λ is the Lyapunov exponent. The rate of separation depends on the orientation of the initial separation vector, so a whole spectrum of Lyapunov exponents can exist. The number of Lyapunov exponents is equal to the number of dimensions of the phase space, though it is common to just refer to the largest one. For example, the maximal Lyapunov exponent (MLE) is most often used, because it determines the overall predictability of the system. A positive MLE is usually taken as an indication that the system is chaotic.
In addition to the above property, other properties related to sensitivity of initial conditions also exist. These include, for example, measure-theoreticalmixing (as discussed in ergodic theory) and properties of a K-system.
Non-periodicity
A chaotic system may have sequences of values for the evolving variable that exactly repeat themselves, giving periodic behavior starting from any point in that sequence. However, such periodic sequences are repelling rather than attracting, meaning that if the evolving variable is outside the sequence, however close, it will not enter the sequence and in fact, will diverge from it. Thus for almost all initial conditions, the variable evolves chaotically with non-periodic behavior.
Topological mixing
Six iterations of a set of states passed through the logistic map. The first iterate (blue) is the initial condition, which essentially forms a circle. Animation shows the first to the sixth iteration of the circular initial conditions. It can be seen that mixing occurs as we progress in iterations. The sixth iteration shows that the points are almost completely scattered in the phase space. Had we progressed further in iterations, the mixing would have been homogeneous and irreversible. The logistic map has equation . To expand the state-space of the logistic map into two dimensions, a second state, , was created as , if and otherwise.
The map defined by x → 4 x (1 – x) and y → (x + y)mod 1 also displays topological mixing. Here, the blue region is transformed by the dynamics first to the purple region, then to the pink and red regions, and eventually to a cloud of vertical lines scattered across the space.
Topological mixing (or the weaker condition of topological transitivity) means that the system evolves over time so that any given region or open set of its phase space eventually overlaps with any other given region. This mathematical concept of “mixing” corresponds to the standard intuition, and the mixing of colored dyes or fluids is an example of a chaotic system.
Topological mixing is often omitted from popular accounts of chaos, which equate chaos with only sensitivity to initial conditions. However, sensitive dependence on initial conditions alone does not give chaos. For example, consider the simple dynamical system produced by repeatedly doubling an initial value. This system has sensitive dependence on initial conditions everywhere, since any pair of nearby points eventually becomes widely separated. However, this example has no topological mixing, and therefore has no chaos. Indeed, it has extremely simple behavior: all points except 0 tend to positive or negative infinity.
Topological transitivity
A map is said to be topologically transitive if for any pair of non-empty open sets ⊂X, there exists such that V≠∅. Topological transitivity is a weaker version of topological mixing. Intuitively, if a map is topologically transitive then given a point x and a region V, there exists a point y near x whose orbit passes through V. This implies that it is impossible to decompose the system into two open sets.
An important related theorem is the Birkhoff Transitivity Theorem. It is easy to see that the existence of a dense orbit implies topological transitivity. The Birkhoff Transitivity Theorem states that if X is a second countable, complete metric space, then topological transitivity implies the existence of a dense set of points in X that have dense orbits.
Density of periodic orbits
For a chaotic system to have denseperiodic orbits means that every point in the space is approached arbitrarily closely by periodic orbits. The one-dimensional logistic map defined by x → 4 x (1 – x) is one of the simplest systems with density of periodic orbits. For example, → → (or approximately 0.3454915 → 0.9045085 → 0.3454915) is an (unstable) orbit of period 2, and similar orbits exist for periods 4, 8, 16, etc. (indeed, for all the periods specified by Sharkovskii’s theorem).
Sharkovskii’s theorem is the basis of the Li and Yorke (1975) proof that any continuous one-dimensional system that exhibits a regular cycle of period three will also display regular cycles of every other length, as well as completely chaotic orbits.
Strange attractors
The Lorenz attractor displays chaotic behavior. These two plots demonstrate sensitive dependence on initial conditions within the region of phase space occupied by the attractor.
Some dynamical systems, like the one-dimensional logistic map defined by x → 4 x (1 – x), are chaotic everywhere, but in many cases chaotic behavior is found only in a subset of phase space. The cases of most interest arise when the chaotic behavior takes place on an attractor, since then a large set of initial conditions leads to orbits that converge to this chaotic region.
An easy way to visualize a chaotic attractor is to start with a point in the basin of attraction of the attractor, and then simply plot its subsequent orbit. Because of the topological transitivity condition, this is likely to produce a picture of the entire final attractor, and indeed both orbits shown in the figure on the right give a picture of the general shape of the Lorenz attractor. This attractor results from a simple three-dimensional model of the Lorenz weather system. The Lorenz attractor is perhaps one of the best-known chaotic system diagrams, probably because it is not only one of the first, but it is also one of the most complex, and as such gives rise to a very interesting pattern that, with a little imagination, looks like the wings of a butterfly.
Unlike fixed-point attractors and limit cycles, the attractors that arise from chaotic systems, known as strange attractors, have great detail and complexity. Strange attractors occur in both continuous dynamical systems (such as the Lorenz system) and in some discrete systems (such as the Hénon map). Other discrete dynamical systems have a repelling structure called a Julia set, which forms at the boundary between basins of attraction of fixed points. Julia sets can be thought of as strange repellers. Both strange attractors and Julia sets typically have a fractal structure, and the fractal dimension can be calculated for them.
Coexisting attractors
Coexisting chaotic and non-chaotic attractors within the generalized Lorenz model There are 128 orbits in different colors, beginning with different initial conditions for dimensionless time between 0.625 and 5 and a heating parameter r = 680. Chaotic orbits recurrently return close to the saddle point at the origin. Nonchaotic orbits eventually approach one of two stable critical points, as shown with large blue dots. Chaotic and nonchaotic orbits occupy different regions of attraction within the phase space.
In contrast to single type chaotic solutions, recent studies using Lorenz models have emphasized the importance of considering various types of solutions. For example, coexisting chaotic and non-chaotic may appear within the same model (e.g., the double pendulum system) using the same modeling configurations but different initial conditions. The findings of attractor coexistence, obtained from classical and generalized Lorenz models, suggested a revised view that “the entirety of weather possesses a dual nature of chaos and order with distinct predictability”, in contrast to the conventional view of “weather is chaotic”.
Minimum complexity of a chaotic system
Bifurcation diagram of the logistic map x → r x (1 – x). Each vertical slice shows the attractor for a specific value of r. The diagram displays period-doubling as r increases, eventually producing chaos. Darker points are visited more frequently.
Discrete chaotic systems, such as the logistic map, can exhibit strange attractors whatever their dimensionality. In contrast, for continuous dynamical systems, the Poincaré–Bendixson theorem shows that a strange attractor can only arise in three or more dimensions. Finite-dimensionallinear systems are never chaotic; for a dynamical system to display chaotic behavior, it must be either nonlinear or infinite-dimensional.
The Poincaré–Bendixson theorem states that a two-dimensional differential equation has very regular behavior. The Lorenz attractor discussed below is generated by a system of three differential equations such as:
where , , and make up the system state, is time, and , , are the system parameters. Five of the terms on the right hand side are linear, while two are quadratic; a total of seven terms. Another well-known chaotic attractor is generated by the Rössler equations, which have only one nonlinear term out of seven. Sprott found a three-dimensional system with just five terms, that had only one nonlinear term, which exhibits chaos for certain parameter values. Zhang and Heidel showed that, at least for dissipative and conservative quadratic systems, three-dimensional quadratic systems with only three or four terms on the right-hand side cannot exhibit chaotic behavior. The reason is, simply put, that solutions to such systems are asymptotic to a two-dimensional surface and therefore solutions are well behaved.
While the Poincaré–Bendixson theorem shows that a continuous dynamical system on the Euclidean plane cannot be chaotic, two-dimensional continuous systems with non-Euclidean geometry can still exhibit some chaotic properties. Perhaps surprisingly, chaos may occur also in linear systems, provided they are infinite dimensional. A theory of linear chaos is being developed in a branch of mathematical analysis known as functional analysis.
The above set of three ordinary differential equations has been referred to as the three-dimensional Lorenz model. Since 1963, higher-dimensional Lorenz models have been developed in numerous studies for examining the impact of an increased degree of nonlinearity, as well as its collective effect with heating and dissipations, on solution stability.
Infinite dimensional maps
The straightforward generalization of coupled discrete maps is based upon convolution integral which mediates interaction between spatially distributed maps: ,
where kernel is propagator derived as Green function of a relevant physical system, might be logistic map alike or complex map. For examples of complex maps the Julia set or Ikeda map may serve. When wave propagation problems at distance L=ct with wavelength λ=2π/k are considered the kernel K may have a form of Green function for Schrödinger equation:.
.
Spontaneous order
Under the right conditions, chaos spontaneously evolves into a lockstep pattern. In the Kuramoto model, four conditions suffice to produce synchronization in a chaotic system. Examples include the coupled oscillation of Christiaan Huygens‘ pendulums, fireflies, neurons, the London Millennium Bridge resonance, and large arrays of Josephson junctions.
Moreover, from the theoretical physics standpoint, dynamical chaos itself, in its most general manifestation, is a spontaneous order. The essence here is that most orders in nature arise from the spontaneous breakdown of various symmetries. This large family of phenomena includes elasticity, superconductivity, ferromagnetism, and many others. According to the supersymmetric theory of stochastic dynamics, chaos, or more precisely, its stochastic generalization, is also part of this family. The corresponding symmetry being broken is the topological supersymmetry which is hidden in all stochastic (partial) differential equations, and the corresponding order parameter is a field-theoretic embodiment of the butterfly effect.
James Clerk Maxwell is seen as being one of the earliest to discuss chaos theory, with work in the 1860s and 1870s. An early proponent of chaos theory was Henri Poincaré. In the 1880s, while studying the three-body problem, he found that there can be orbits that are nonperiodic, and yet not forever increasing nor approaching a fixed point. In 1898, Jacques Hadamard published an influential study of the chaotic motion of a free particle gliding frictionlessly on a surface of constant negative curvature, called “Hadamard’s billiards“. Hadamard was able to show that all trajectories are unstable, in that all particle trajectories diverge exponentially from one another, with a positive Lyapunov exponent.
Chaos theory began in the field of ergodic theory. Later studies, also on the topic of nonlinear differential equations, were carried out by George David Birkhoff, Andrey Nikolaevich Kolmogorov, Mary Lucy Cartwright and John Edensor Littlewood, and Stephen Smale. Although chaotic planetary motion had not been observed, experimentalists had encountered turbulence in fluid motion and nonperiodic oscillation in radio circuits without the benefit of a theory to explain what they were seeing.
Despite initial insights in the first half of the twentieth century, chaos theory became formalized as such only after mid-century, when it first became evident to some scientists that linear theory, the prevailing system theory at that time, simply could not explain the observed behavior of certain experiments like that of the logistic map. What had been attributed to measure imprecision and simple “noise” was considered by chaos theorists as a full component of the studied systems. In 1959 Boris Valerianovich Chirikov proposed a criterion for the emergence of classical chaos in Hamiltonian systems (Chirikov criterion). He applied this criterion to explain some experimental results on plasma confinement in open mirror traps.This is regarded as the very first physical theory of chaos, which succeeded in explaining a concrete experiment. And Boris Chirikov himself is considered as a pioneer in classical and quantum chaos.
The main catalyst for the development of chaos theory was the electronic computer. Much of the mathematics of chaos theory involves the repeated iteration of simple mathematical formulas, which would be impractical to do by hand. Electronic computers made these repeated calculations practical, while figures and images made it possible to visualize these systems. As a graduate student in Chihiro Hayashi’s laboratory at Kyoto University, Yoshisuke Ueda was experimenting with analog computers and noticed, on November 27, 1961, what he called “randomly transitional phenomena”. Yet his advisor did not agree with his conclusions at the time, and did not allow him to report his findings until 1970.
Edward Lorenz was an early pioneer of the theory. His interest in chaos came about accidentally through his work on weather prediction in 1961. Lorenz and his collaborator Ellen Fetter and Margaret Hamilton were using a simple digital computer, a Royal McBeeLGP-30, to run weather simulations. They wanted to see a sequence of data again, and to save time they started the simulation in the middle of its course. They did this by entering a printout of the data that corresponded to conditions in the middle of the original simulation. To their surprise, the weather the machine began to predict was completely different from the previous calculation. They tracked this down to the computer printout. The computer worked with 6-digit precision, but the printout rounded variables off to a 3-digit number, so a value like 0.506127 printed as 0.506. This difference is tiny, and the consensus at the time would have been that it should have no practical effect. However, Lorenz discovered that small changes in initial conditions produced large changes in long-term outcome. Lorenz’s discovery, which gave its name to Lorenz attractors, showed that even detailed atmospheric modeling cannot, in general, make precise long-term weather predictions.
In 1963, Benoit Mandelbrot, studying information theory, discovered that noise in many phenomena (including stock prices and telephone circuits) was patterned like a Cantor set, a set of points with infinite roughness and detail Mandelbrot described both the “Noah effect” (in which sudden discontinuous changes can occur) and the “Joseph effect” (in which persistence of a value can occur for a while, yet suddenly change afterwards). In 1967, he published “How long is the coast of Britain? Statistical self-similarity and fractional dimension“, showing that a coastline’s length varies with the scale of the measuring instrument, resembles itself at all scales, and is infinite in length for an infinitesimally small measuring device. Arguing that a ball of twine appears as a point when viewed from far away (0-dimensional), a ball when viewed from fairly near (3-dimensional), or a curved strand (1-dimensional), he argued that the dimensions of an object are relative to the observer and may be fractional. An object whose irregularity is constant over different scales (“self-similarity”) is a fractal (examples include the Menger sponge, the Sierpiński gasket, and the Koch curve or snowflake, which is infinitely long yet encloses a finite space and has a fractal dimension of circa 1.2619). In 1982, Mandelbrot published The Fractal Geometry of Nature, which became a classic of chaos theory.
In December 1977, the New York Academy of Sciences organized the first symposium on chaos, attended by David Ruelle, Robert May, James A. Yorke (coiner of the term “chaos” as used in mathematics), Robert Shaw, and the meteorologist Edward Lorenz. The following year Pierre Coullet and Charles Tresser published “Itérations d’endomorphismes et groupe de renormalisation”, and Mitchell Feigenbaum‘s article “Quantitative Universality for a Class of Nonlinear Transformations” finally appeared in a journal, after 3 years of referee rejections. Thus Feigenbaum (1975) and Coullet & Tresser (1978) discovered the universality in chaos, permitting the application of chaos theory to many different phenomena.
In 1979, Albert J. Libchaber, during a symposium organized in Aspen by Pierre Hohenberg, presented his experimental observation of the bifurcation cascade that leads to chaos and turbulence in Rayleigh–Bénard convection systems. He was awarded the Wolf Prize in Physics in 1986 along with Mitchell J. Feigenbaum for their inspiring achievements.
In 1986, the New York Academy of Sciences co-organized with the National Institute of Mental Health and the Office of Naval Research the first important conference on chaos in biology and medicine. There, Bernardo Huberman presented a mathematical model of the eye tracking dysfunction among people with schizophrenia. This led to a renewal of physiology in the 1980s through the application of chaos theory, for example, in the study of pathological cardiac cycles.
In 1987, Per Bak, Chao Tang and Kurt Wiesenfeld published a paper in Physical Review Letters describing for the first time self-organized criticality (SOC), considered one of the mechanisms by which complexity arises in nature.
Alongside largely lab-based approaches such as the Bak–Tang–Wiesenfeld sandpile, many other investigations have focused on large-scale natural or social systems that are known (or suspected) to display scale-invariant behavior. Although these approaches were not always welcomed (at least initially) by specialists in the subjects examined, SOC has nevertheless become established as a strong candidate for explaining a number of natural phenomena, including earthquakes, (which, long before SOC was discovered, were known as a source of scale-invariant behavior such as the Gutenberg–Richter law describing the statistical distribution of earthquake sizes, and the Omori law describing the frequency of aftershocks), solar flares, fluctuations in economic systems such as financial markets (references to SOC are common in econophysics), landscape formation, forest fires, landslides, epidemics, and biological evolution (where SOC has been invoked, for example, as the dynamical mechanism behind the theory of “punctuated equilibria” put forward by Niles Eldredge and Stephen Jay Gould). Given the implications of a scale-free distribution of event sizes, some researchers have suggested that another phenomenon that should be considered an example of SOC is the occurrence of wars. These investigations of SOC have included both attempts at modelling (either developing new models or adapting existing ones to the specifics of a given natural system), and extensive data analysis to determine the existence and/or characteristics of natural scaling laws.
Also in 1987 James Gleick published Chaos: Making a New Science, which became a best-seller and introduced the general principles of chaos theory as well as its history to the broad public.[90] Initially the domain of a few, isolated individuals, chaos theory progressively emerged as a transdisciplinary and institutional discipline, mainly under the name of nonlinear systems analysis. Alluding to Thomas Kuhn‘s concept of a paradigm shift exposed in The Structure of Scientific Revolutions (1962), many “chaologists” (as some described themselves) claimed that this new theory was an example of such a shift, a thesis upheld by Gleick.
The availability of cheaper, more powerful computers broadens the applicability of chaos theory. Currently, chaos theory remains an active area of research, involving many different disciplines such as mathematics, topology, physics,social systems,population modeling, biology, meteorology, astrophysics, information theory, computational neuroscience, pandemiccrisis management, etc.
Lorenz’s pioneering contributions to chaotic modeling
Throughout his career, Professor Edward Lorenz authored a total of 61 research papers, out of which 58 were solely authored by him. Commencing with the 1960 conference in Japan, Lorenz embarked on a journey of developing diverse models aimed at uncovering the SDIC and chaotic features. A recent review of Lorenz’s model progression spanning from 1960 to 2008 revealed his adeptness at employing varied physical systems to illustrate chaotic phenomena. These systems encompassed Quasi-geostrophic systems, the Conservative Vorticity Equation, the Rayleigh-Bénard Convection Equations, and the Shallow Water Equations. Moreover, Lorenz can be credited with the early application of the logistic map to explore chaotic solutions, a milestone he achieved ahead of his colleagues (e.g. Lorenz 1964).
In 1972, Lorenz coined the term “butterfly effect” as a metaphor to discuss whether a small perturbation could eventually create a tornado with a three-dimensional, organized, and coherent structure. While connected to the original butterfly effect based on sensitive dependence on initial conditions, its metaphorical variant carries distinct nuances. To commemorate this milestone, a reprint book containing invited papers that deepen our understanding of both butterfly effects was officially published to celebrate the 50th anniversary of the metaphorical butterfly effect.
A popular but inaccurate analogy for chaos
The sensitive dependence on initial conditions (i.e., butterfly effect) has been illustrated using the following folklore:
For want of a nail, the shoe was lost.
For want of a shoe, the horse was lost.
For want of a horse, the rider was lost.
For want of a rider, the battle was lost.
For want of a battle, the kingdom was lost.
And all for the want of a horseshoe nail.
Based on the above, many people mistakenly believe that the impact of a tiny initial perturbation monotonically increases with time and that any tiny perturbation can eventually produce a large impact on numerical integrations. However, in 2008, Lorenz stated that he did not feel that this verse described true chaos but that it better illustrated the simpler phenomenon of instability and that the verse implicitly suggests that subsequent small events will not reverse the outcome. Based on the analysis, the verse only indicates divergence, not boundedness. Boundedness is important for the finite size of a butterfly pattern. In a recent study, the characteristic of the aforementioned verse was recently denoted as “finite-time sensitive dependence”.
Main article: Chaotic cryptology
Chaos theory has been used for many years in cryptography. In the past few decades, chaos and nonlinear dynamics have been used in the design of hundreds of cryptographic primitives. These algorithms include image encryption algorithms, hash functions, secure pseudo-random number generators, stream ciphers, watermarking, and steganography.[119] The majority of these algorithms are based on uni-modal chaotic maps and a big portion of these algorithms use the control parameters and the initial condition of the chaotic maps as their keys. From a wider perspective, without loss of generality, the similarities between the chaotic maps and the cryptographic systems is the main motivation for the design of chaos based cryptographic algorithms. One type of encryption, secret key or symmetric key, relies on diffusion and confusion, which is modeled well by chaos theory. Another type of computing, DNA computing, when paired with chaos theory, offers a way to encrypt images and other information. Many of the DNA-Chaos cryptographic algorithms are proven to be either not secure, or the technique applied is suggested to be not efficient.
Robotics
Robotics is another area that has recently benefited from chaos theory. Instead of robots acting in a trial-and-error type of refinement to interact with their environment, chaos theory has been used to build a predictive model. Chaotic dynamics have been exhibited by passive walking biped robots.
Biology
For over a hundred years, biologists have been keeping track of populations of different species with population models. Most models are continuous, but recently scientists have been able to implement chaotic models in certain populations. For example, a study on models of Canadian lynx showed there was chaotic behavior in the population growth. Chaos can also be found in ecological systems, such as hydrology. While a chaotic model for hydrology has its shortcomings, there is still much to learn from looking at the data through the lens of chaos theory. Another biological application is found in cardiotocography. Fetal surveillance is a delicate balance of obtaining accurate information while being as noninvasive as possible. Better models of warning signs of fetal hypoxia can be obtained through chaotic modeling.
As Perry points out, modeling of chaotic time series in ecology is helped by constraint. There is always potential difficulty in distinguishing real chaos from chaos that is only in the model. Hence both constraint in the model and or duplicate time series data for comparison will be helpful in constraining the model to something close to the reality, for example Perry & Wall 1984. Gene-for-gene co-evolution sometimes shows chaotic dynamics in allele frequencies. Adding variables exaggerates this: Chaos is more common in models incorporating additional variables to reflect additional facets of real populations.Robert M. May himself did some of these foundational crop co-evolution studies, and this in turn helped shape the entire field. Even for a steady environment, merely combining one crop and one pathogen may result in quasi-periodic- or chaotic- oscillations in pathogen population.
Economics
It is possible that economic models can also be improved through an application of chaos theory, but predicting the health of an economic system and what factors influence it most is an extremely complex task. Economic and financial systems are fundamentally different from those in the classical natural sciences since the former are inherently stochastic in nature, as they result from the interactions of people, and thus pure deterministic models are unlikely to provide accurate representations of the data. The empirical literature that tests for chaos in economics and finance presents very mixed results, in part due to confusion between specific tests for chaos and more general tests for non-linear relationships.
Chaos could be found in economics by the means of recurrence quantification analysis. In fact, Orlando et al. by the means of the so-called recurrence quantification correlation index were able detect hidden changes in time series. Then, the same technique was employed to detect transitions from laminar (regular) to turbulent (chaotic) phases as well as differences between macroeconomic variables and highlight hidden features of economic dynamics. Finally, chaos theory could help in modeling how an economy operates as well as in embedding shocks due to external events such as COVID-19.
Finite predictability in weather and climate
Due to the sensitive dependence of solutions on initial conditions (SDIC), also known as the butterfly effect, chaotic systems like the Lorenz 1963 model imply a finite predictability horizon. This means that while accurate predictions are possible over a finite time period, they are not feasible over an infinite time span. Considering the nature of Lorenz’s chaotic solutions, the committee led by Charney et al. in 1966 extrapolated a doubling time of five days from a general circulation model, suggesting a predictability limit of two weeks. This connection between the five-day doubling time and the two-week predictability limit was also recorded in a 1969 report by the Global Atmospheric Research Program (GARP). To acknowledge the combined direct and indirect influences from the Mintz and Arakawa model and Lorenz’s models, as well as the leadership of Charney et al., Shen et al. refer to the two-week predictability limit as the “Predictability Limit Hypothesis,” drawing an analogy to Moore’s Law.
AI-extended modeling framework
In AI-driven large language models, responses can exhibit sensitivities to factors like alterations in formatting and variations in prompts. These sensitivities are akin to butterfly effects. Although classifying AI-powered large language models as classical deterministic chaotic systems poses challenges, chaos-inspired approaches and techniques (such as ensemble modeling) may be employed to extract reliable information from these expansive language models (see also “Butterfly Effect in Popular Culture“).
Other areas
In chemistry, predicting gas solubility is essential to manufacturing polymers, but models using particle swarm optimization (PSO) tend to converge to the wrong points. An improved version of PSO has been created by introducing chaos, which keeps the simulations from getting stuck.[144] In celestial mechanics, especially when observing asteroids, applying chaos theory leads to better predictions about when these objects will approach Earth and other planets.[145] Four of the five moons of Pluto rotate chaotically. In quantum physics and electrical engineering, the study of large arrays of Josephson junctions benefitted greatly from chaos theory. Closer to home, coal mines have always been dangerous places where frequent natural gas leaks cause many deaths. Until recently, there was no reliable way to predict when they would occur. But these gas leaks have chaotic tendencies that, when properly modeled, can be predicted fairly accurately.
Chaos theory can be applied outside of the natural sciences, but historically nearly all such studies have suffered from lack of reproducibility; poor external validity; and/or inattention to cross-validation, resulting in poor predictive accuracy (if out-of-sample prediction has even been attempted). Glass and Mandell and Selz have found that no EEG study has as yet indicated the presence of strange attractors or other signs of chaotic behavior.
Redington and Reidbord (1992) attempted to demonstrate that the human heart could display chaotic traits. They monitored the changes in between-heartbeat intervals for a single psychotherapy patient as she moved through periods of varying emotional intensity during a therapy session. Results were admittedly inconclusive. Not only were there ambiguities in the various plots the authors produced to purportedly show evidence of chaotic dynamics (spectral analysis, phase trajectory, and autocorrelation plots), but also when they attempted to compute a Lyapunov exponent as more definitive confirmation of chaotic behavior, the authors found they could not reliably do so.
In their 1995 paper, Metcalf and Allen maintained that they uncovered in animal behavior a pattern of period doubling leading to chaos. The authors examined a well-known response called schedule-induced polydipsia, by which an animal deprived of food for certain lengths of time will drink unusual amounts of water when the food is at last presented. The control parameter (r) operating here was the length of the interval between feedings, once resumed. The authors were careful to test a large number of animals and to include many replications, and they designed their experiment so as to rule out the likelihood that changes in response patterns were caused by different starting places for r.
Time series and first delay plots provide the best support for the claims made, showing a fairly clear march from periodicity to irregularity as the feeding times were increased. The various phase trajectory plots and spectral analyses, on the other hand, do not match up well enough with the other graphs or with the overall theory to lead inexorably to a chaotic diagnosis. For example, the phase trajectories do not show a definite progression towards greater and greater complexity (and away from periodicity); the process seems quite muddied. Also, where Metcalf and Allen saw periods of two and six in their spectral plots, there is room for alternative interpretations. All of this ambiguity necessitate some serpentine, post-hoc explanation to show that results fit a chaotic model.
By adapting a model of career counseling to include a chaotic interpretation of the relationship between employees and the job market, Amundson and Bright found that better suggestions can be made to people struggling with career decisions. Modern organizations are increasingly seen as open complex adaptive systems with fundamental natural nonlinear structures, subject to internal and external forces that may contribute chaos. For instance, team building and group development is increasingly being researched as an inherently unpredictable system, as the uncertainty of different individuals meeting for the first time makes the trajectory of the team unknowable.
Traffic forecasting may benefit from applications of chaos theory. Better predictions of when a congestion will occur would allow measures to be taken to disperse it before it would have occurred. Combining chaos theory principles with a few other methods has led to a more accurate short-term prediction model (see the plot of the BML traffic model at right).
Chaos theory has been applied to environmental water cycle data (also hydrological data), such as rainfall and streamflow. These studies have yielded controversial results, because the methods for detecting a chaotic signature are often relatively subjective. Early studies tended to “succeed” in finding chaos, whereas subsequent studies and meta-analyses called those studies into question and provided explanations for why these datasets are not likely to have low-dimension chaotic dynamics.
In the mathematical field of dynamical systems, an attractor is a set of states toward which a system tends to evolve,[2] for a wide variety of starting conditions of the system. System values that get close enough to the attractor values remain close even if slightly disturbed.
In finite-dimensional systems, the evolving variable may be represented algebraically as an n-dimensional vector. The attractor is a region in n-dimensional space. In physical systems, the n dimensions may be, for example, two or three positional coordinates for each of one or more physical entities; in economic systems, they may be separate variables such as the inflation rate and the unemployment rate.[not verified in body]
If the evolving variable is two- or three-dimensional, the attractor of the dynamic process can be represented geometrically in two or three dimensions, (as for example in the three-dimensional case depicted to the right). An attractor can be a point, a finite set of points, a curve, a manifold, or even a complicated set with a fractal structure known as a strange attractor (see strange attractor below). If the variable is a scalar, the attractor is a subset of the real number line. Describing the attractors of chaotic dynamical systems has been one of the achievements of chaos theory.
A trajectory of the dynamical system in the attractor does not have to satisfy any special constraints except for remaining on the attractor, forward in time. The trajectory may be periodic or chaotic. If a set of points is periodic or chaotic, but the flow in the neighborhood is away from the set, the set is not an attractor, but instead is called a repeller (or repellor).
Motivation of attractors
[edit]
A dynamical system is generally described by one or more differential or difference equations. The equations of a given dynamical system specify its behavior over any given short period of time. To determine the system’s behavior for a longer period, it is often necessary to integrate the equations, either through analytical means or through iteration, often with the aid of computers.
Dynamical systems in the physical world tend to arise from dissipative systems: if it were not for some driving force, the motion would cease. (Dissipation may come from internal friction, thermodynamic losses, or loss of material, among many causes.) The dissipation and the driving force tend to balance, killing off initial transients and settle the system into its typical behavior. The subset of the phase space of the dynamical system corresponding to the typical behavior is the attractor, also known as the attracting section or attractee.
Invariant sets and limit sets are similar to the attractor concept. An invariant set is a set that evolves to itself under the dynamics.[3] Attractors may contain invariant sets. A limit set is a set of points such that there exists some initial state that ends up arbitrarily close to the limit set (i.e. to each point of the set) as time goes to infinity. Attractors are limit sets, but not all limit sets are attractors: It is possible to have some points of a system converge to a limit set, but different points when perturbed slightly off the limit set may get knocked off and never return to the vicinity of the limit set.
For example, the dampedpendulum has two invariant points: the point x0 of minimum height and the point x1 of maximum height. The point x0 is also a limit set, as trajectories converge to it; the point x1 is not a limit set. Because of the dissipation due to air resistance, the point x0 is also an attractor. If there was no dissipation, x0 would not be an attractor. Aristotle believed that objects moved only as long as they were pushed, which is an early formulation of a dissipative attractor.
Some attractors are known to be chaotic (see strange attractor), in which case the evolution of any two distinct points of the attractor result in exponentially diverging trajectories, which complicates prediction when even the smallest noise is present in the system.[4]
Mathematical definition
[edit]
Let t represent time and let f(t,⋅) be a function which specifies the dynamics of the system. That is, if a is a point in an n-dimensional phase space, representing the initial state of the system, then f(0,a)=a and, for a positive value of t, f(t,a) is the result of the evolution of this state after t units of time. For example, if the system describes the evolution of a free particle in one dimension then the phase space is the plane R2 with coordinates (x,v), where x is the position of the particle, v is its velocity, a=(x,v), and the evolution is given by
Attracting period-3 cycle and its immediate basin of attraction for a certain parametrization of the Julia set, which iterates the function f(z) = z2 + c. The three darkest points are the points of the 3-cycle, which lead to each other in sequence, and iteration from any point in the basin of attraction leads to (usually asymptotic) convergence to this sequence of three points.
f(t,(x,v))=(x+tv,v).
An attractor is a subset A of the phase space characterized by the following three conditions:
A is forward invariant under f: if a is an element of A then so is f(t,a), for all t>0.
There exists a neighborhood of A, called the basin of attraction for A and denoted B(A), which consists of all points b that “enter” A in the limit t→∞. More formally, B(A) is the set of all points b in the phase space with the following property:
For any open neighborhood N of A, there is a positive constant T such that f(t,b)∈N for all real t>T.
There is no proper (non-empty) subset of A having the first two properties.
Since the basin of attraction contains an open set containing A, every point that is sufficiently close to A is attracted to A. The definition of an attractor uses a metric on the phase space, but the resulting notion usually depends only on the topology of the phase space. In the case of Rn, the Euclidean norm is typically used.
Many other definitions of attractor occur in the literature. For example, some authors require that an attractor have positive measure (preventing a point from being an attractor), others relax the requirement that B(A) be a neighborhood.[5]
[edit]
Weakly attracting fixed point for a complex number evolving according to a complex quadratic polynomial. The phase space is the horizontal complex plane; the vertical axis measures the frequency with which points in the complex plane are visited. The point in the complex plane directly below the peak frequency is the fixed point attractor.
A fixed point of a function or transformation is a point that is mapped to itself by the function or transformation. If we regard the evolution of a dynamical system as a series of transformations, then there may or may not be a point which remains fixed under each transformation. The final state that a dynamical system evolves towards corresponds to an attracting fixed point of the evolution function for that system, such as the center bottom position of a dampedpendulum, the level and flat water line of sloshing water in a glass, or the bottom center of a bowl containing a rolling marble. But the fixed point(s) of a dynamic system is not necessarily an attractor of the system. For example, if the bowl containing a rolling marble was inverted and the marble was balanced on top of the bowl, the center bottom (now top) of the bowl is a fixed state, but not an attractor. This is equivalent to the difference between stable and unstable equilibria. In the case of a marble on top of an inverted bowl (a hill), that point at the top of the bowl (hill) is a fixed point (equilibrium), but not an attractor (unstable equilibrium).
In addition, physical dynamic systems with at least one fixed point invariably have multiple fixed points and attractors due to the reality of dynamics in the physical world, including the nonlinear dynamics of stiction, friction, surface roughness, deformation (both elastic and plasticity), and even quantum mechanics.[6] In the case of a marble on top of an inverted bowl, even if the bowl seems perfectly hemispherical, and the marble’s spherical shape, are both much more complex surfaces when examined under a microscope, and their shapes change or deform during contact. Any physical surface can be seen to have a rough terrain of multiple peaks, valleys, saddle points, ridges, ravines, and plains.[7] There are many points in this surface terrain (and the dynamic system of a similarly rough marble rolling around on this microscopic terrain) that are considered stationary or fixed points, some of which are categorized as attractors.
Finite number of points
[edit]
In a discrete-time system, an attractor can take the form of a finite number of points that are visited in sequence. Each of these points is called a periodic point. This is illustrated by the logistic map, which depending on its specific parameter value can have an attractor consisting of 1 point, 2 points, 2n points, 3 points, 3×2n points, 4 points, 5 points, or any given positive integer number of points.
Limit cycle
[edit]Main article: Limit cycle
A limit cycle is a periodic orbit of a continuous dynamical system that is isolated. It concerns a cyclic attractor. Examples include the swings of a pendulum clock, and the heartbeat while resting. The limit cycle of an ideal pendulum is not an example of a limit cycle attractor because its orbits are not isolated: in the phase space of the ideal pendulum, near any point of a periodic orbit there is another point that belongs to a different periodic orbit, so the former orbit is not attracting. For a physical pendulum under friction, the resting state will be a fixed-point attractor. The difference with the clock pendulum is that there, energy is injected by the escapement mechanism to maintain the cycle.
Van der Polphase portrait: an attracting limit cycle
Limit torus
[edit]
There may be more than one frequency in the periodic trajectory of the system through the state of a limit cycle. For example, in physics, one frequency may dictate the rate at which a planet orbits a star while a second frequency describes the oscillations in the distance between the two bodies. If two of these frequencies form an irrational fraction (i.e. they are incommensurate), the trajectory is no longer closed, and the limit cycle becomes a limit torus. This kind of attractor is called an Nt -torus if there are Nt incommensurate frequencies. For example, here is a 2-torus:
A time series corresponding to this attractor is a quasiperiodic series: A discretely sampled sum of Nt periodic functions (not necessarily sine waves) with incommensurate frequencies. Such a time series does not have a strict periodicity, but its power spectrum still consists only of sharp lines.[citation needed]
Strange attractor
[edit]”Strange attractor” redirects here. For other uses, see Strange Attractor (disambiguation).
A plot of Lorenz’s strange attractor for values ρ = 28, σ = 10, β = 8/3
An attractor is called strange if it has a fractal structure, that is if it has non-integer Hausdorff dimension. This is often the case when the dynamics on it are chaotic, but strange nonchaotic attractors also exist. If a strange attractor is chaotic, exhibiting sensitive dependence on initial conditions, then any two arbitrarily close alternative initial points on the attractor, after any of various numbers of iterations, will lead to points that are arbitrarily far apart (subject to the confines of the attractor), and after any of various other numbers of iterations will lead to points that are arbitrarily close together. Thus a dynamic system with a chaotic attractor is locally unstable yet globally stable: once some sequences have entered the attractor, nearby points diverge from one another but never depart from the attractor.[8]
The term strange attractor was coined by David Ruelle and Floris Takens to describe the attractor resulting from a series of bifurcations of a system describing fluid flow.[9] Strange attractors are often differentiable in a few directions, but some are like a Cantor dust, and therefore not differentiable. Strange attractors may also be found in the presence of noise, where they may be shown to support invariant random probability measures of Sinai–Ruelle–Bowen type.[10]
Examples of strange attractors include the double-scroll attractor, Hénon attractor, Rössler attractor, and Lorenz attractor.
Attractors characterize the evolution of a system
[edit]
Bifurcation diagram of the logistic map. The attractor(s) for any value of the parameter r are shown on the ordinate in the domain 0<x<1. The colour of a point indicates how often the point (r,x) is visited over the course of 106 iterations: frequently encountered values are coloured in blue, less frequently encountered values are yellow. A bifurcation appears around r≈3.0, a second bifurcation (leading to four attractor values) around r≈3.5. The behaviour is increasingly complicated for r>3.6, interspersed with regions of simpler behaviour (white stripes).
The parameters of a dynamic equation evolve as the equation is iterated, and the specific values may depend on the starting parameters. An example is the well-studied logistic map, xn+1=rxn(1−xn), whose basins of attraction for various values of the parameter r are shown in the figure. If r=2.6, all starting x values of x<0 will rapidly lead to function values that go to negative infinity; starting x values of x>1 will also go to negative infinity. But for 0<x<1 the x values rapidly converge to x≈0.615, i.e. at this value of r, a single value of x is an attractor for the function’s behaviour. For other values of r, more than one value of x may be visited: if r is 3.2, starting values of 0<x<1 will lead to function values that alternate between x≈0.513 and x≈0.799. At some values of r, the attractor is a single point (a “fixed point”), at other values of r two values of x are visited in turn (a period-doubling bifurcation), or, as a result of further doubling, any number k×2n values of x; at yet other values of r, any given number of values of x are visited in turn; finally, for some values of r, an infinitude of points are visited. Thus one and the same dynamic equation can have various types of attractors, depending on its parameters.
Basins of attraction
[edit]
An attractor’s basin of attraction is the region of the phase space, over which iterations are defined, such that any point (any initial condition) in that region will asymptotically be iterated into the attractor. For a stablelinear system, every point in the phase space is in the basin of attraction. However, in nonlinear systems, some points may map directly or asymptotically to infinity, while other points may lie in a different basin of attraction and map asymptotically into a different attractor; other initial conditions may be in or map directly into a non-attracting point or cycle.[11]
Linear equation or system
[edit]
An univariate linear homogeneous difference equation xt=axt−1 diverges to infinity if |a|>1 from all initial points except 0; there is no attractor and therefore no basin of attraction. But if |a|<1 all points on the number line map asymptotically (or directly in the case of 0) to 0; 0 is the attractor, and the entire number line is the basin of attraction.
Likewise, a linear matrix difference equation in a dynamic vector X, of the homogeneous form Xt=AXt−1 in terms of square matrix A will have all elements of the dynamic vector diverge to infinity if the largest eigenvalues of A is greater than 1 in absolute value; there is no attractor and no basin of attraction. But if the largest eigenvalue is less than 1 in magnitude, all initial vectors will asymptotically converge to the zero vector, which is the attractor; the entire n-dimensional space of potential initial vectors is the basin of attraction.
Similar features apply to linear differential equations. The scalar equation dx/dt=ax causes all initial values of x except zero to diverge to infinity if a>0 but to converge to an attractor at the value 0 if a<0, making the entire number line the basin of attraction for 0. And the matrix system dX/dt=AX gives divergence from all initial points except the vector of zeroes if any eigenvalue of the matrix A is positive; but if all the eigenvalues are negative the vector of zeroes is an attractor whose basin of attraction is the entire phase space.
Nonlinear equation or system
[edit]
Equations or systems that are nonlinear can give rise to a richer variety of behavior than can linear systems. One example is Newton’s method of iterating to a root of a nonlinear expression. If the expression has more than one real root, some starting points for the iterative algorithm will lead to one of the roots asymptotically, and other starting points will lead to another. The basins of attraction for the expression’s roots are generally not simple—it is not simply that the points nearest one root all map there, giving a basin of attraction consisting of nearby points. The basins of attraction can be infinite in number and arbitrarily small. For example,[12] for the function f(x)=x3−2×2−11x+12, the following initial conditions are in successive basins of attraction:
A Newton fractal showing basins of attraction in the complex plane for using Newton’s method to solve x5 − 1 = 0. Points in like-colored regions map to the same root; darker means more iterations are needed to converge.
2.35287527 converges to 4;
2.35284172 converges to −3;
2.35283735 converges to 4;
2.352836327 converges to −3;
2.352836323 converges to 1.
Newton’s method can also be applied to complex functions to find their roots. Each root has a basin of attraction in the complex plane; these basins can be mapped as in the image shown. As can be seen, the combined basin of attraction for a particular root can have many disconnected regions. For many complex functions, the boundaries of the basins of attraction are fractals.
Partial differential equations
[edit]
Parabolic partial differential equations may have finite-dimensional attractors. The diffusive part of the equation damps higher frequencies and in some cases leads to a global attractor. The Ginzburg–Landau, the Kuramoto–Sivashinsky, and the two-dimensional, forced Navier–Stokes equations are all known to have global attractors of finite dimension.
For the three-dimensional, incompressible Navier–Stokes equation with periodic boundary conditions, if it has a global attractor, then this attractor will be of finite dimensions.[13]
See also
[edit]Wikimedia Commons has media related to Attractor.












 , and it has its own two Feigenbaum constants:
, and it has its own two Feigenbaum constants:  .
.

 , and we want to study what happens when we iterate the map many times. The map might fall into a
, and we want to study what happens when we iterate the map many times. The map might fall into a  , we would find that the graph of frn
, we would find that the graph of frn  and the graph of x↦x
and the graph of x↦x intersects at n
intersects at n at those intersections.
For example, when 0
at those intersections.
For example, when 0 , we have a single intersection, with slope bounded in
, we have a single intersection, with slope bounded in  increases to beyond
increases to beyond  , there are three intersection points, with the middle one unstable, and the two others stable.
As r
, there are three intersection points, with the middle one unstable, and the two others stable.
As r , another period-doubling occurs in the same way. The period-doublings occur more and more frequently, until at a certain
, another period-doubling occurs in the same way. The period-doublings occur more and more frequently, until at a certain  , the period doublings become infinite, and the map becomes chaotic. This is the
, the period doublings become infinite, and the map becomes chaotic. This is the .png) Relationship between and xn when . Before the period doubling bifurcation occurs. The orbit converges to the fixed point .
Relationship between and xn when . Before the period doubling bifurcation occurs. The orbit converges to the fixed point .
 and xn
and xn when
when  . Before the period doubling bifurcation occurs. The orbit converges to the fixed point
. Before the period doubling bifurcation occurs. The orbit converges to the fixed point  .
.
.png) Relationship between and xn when . The tangent slope at the fixed point xf2. is exactly 1, and a period doubling bifurcation occurs.
Relationship between and xn when . The tangent slope at the fixed point xf2. is exactly 1, and a period doubling bifurcation occurs.
 . The tangent slope at the fixed point xf2
. The tangent slope at the fixed point xf2.png) Relationship between and xn when.3. The fixed point xf2 becomes unstable, splitting into a periodic-2 stable cycle.
Relationship between and xn when.3. The fixed point xf2 becomes unstable, splitting into a periodic-2 stable cycle.
 . The fixed point xf2
. The fixed point xf2 When , we have a single intersection, with slope exactly +1, indicating that it is about to undergo a period-doubling.
When , we have a single intersection, with slope exactly +1, indicating that it is about to undergo a period-doubling.
 , indicating that it is about to undergo a period-doubling.
, indicating that it is about to undergo a period-doubling.
 When , there are three intersection points, with the middle one unstable, and the two others stable.
When , there are three intersection points, with the middle one unstable, and the two others stable.
 When , there are three intersection points, with the middle one unstable, and the two others having slope exactly +1, indicating that it is about to undergo another period-doubling.
When , there are three intersection points, with the middle one unstable, and the two others having slope exactly +1, indicating that it is about to undergo another period-doubling.
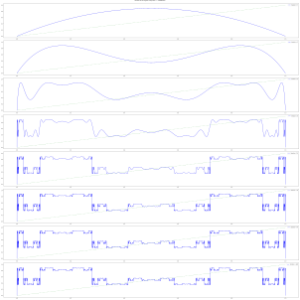 When r≈3.56994567, there are infinitely many intersections, and we have arrived at chaos via the period-doubling route.
When r≈3.56994567, there are infinitely many intersections, and we have arrived at chaos via the period-doubling route.
 from below.
from below.
 , the graphs seem to resemble each other, except that they are shrunken towards the middle, and rotated by 180 degrees, converging to a fractal.
, the graphs seem to resemble each other, except that they are shrunken towards the middle, and rotated by 180 degrees, converging to a fractal. looks like a fractal. Furthermore, as we repeat the period-doublingsfr∗1,fr∗2,fr∗4,fr∗8,fr∗16,…
looks like a fractal. Furthermore, as we repeat the period-doublingsfr∗1,fr∗2,fr∗4,fr∗8,fr∗16,… for a certain constant α
for a certain constant α then at the limit, we would end up with a function g
then at the limit, we would end up with a function g that satisfies g(x)=−αg(g(−x/α))
that satisfies g(x)=−αg(g(−x/α)) . Further, as the period-doubling intervals become shorter and shorter, the
. Further, as the period-doubling intervals become shorter and shorter, the  .
.
 , it converges.
, it converges.
 , the limit of the iterates of the map, becomes chaotic dark bands interspersed with non-chaotic bright bands.
, the limit of the iterates of the map, becomes chaotic dark bands interspersed with non-chaotic bright bands.
 , we have another period-doubling approach to chaos, but this time with periods 3, 6, 12, … This again has the same Feigenbaum constants δ,α
, we have another period-doubling approach to chaos, but this time with periods 3, 6, 12, … This again has the same Feigenbaum constants δ,α . The limit of f(x)↦−αf(f(−x/α))
. The limit of f(x)↦−αf(f(−x/α)) is also the same function. This is an example of universality.
is also the same function. This is an example of universality.
 from below. At the limit, this has the same shape as that of r∗=3.5699⋯
from below. At the limit, this has the same shape as that of r∗=3.5699⋯ such that rn
such that rn is the lowest value in the period-3n
is the lowest value in the period-3n window of the bifurcation diagram. For example, we have r1=3.8284,r2=3.85361,…
window of the bifurcation diagram. For example, we have r1=3.8284,r2=3.85361,… , with the limit r∞=3.854077963…
, with the limit r∞=3.854077963… . This has a different pair of Feigenbaum constants δ=55.26…,α=9.277…
. This has a different pair of Feigenbaum constants δ=55.26…,α=9.277… .
. As another example, period-4-pling has a pair of Feigenbaum constants distinct from that of period-doubling, even though period-4-pling is reached by two period-doublings. In detail, define r1,r2,…
As another example, period-4-pling has a pair of Feigenbaum constants distinct from that of period-doubling, even though period-4-pling is reached by two period-doublings. In detail, define r1,r2,… window of the bifurcation diagram. Then we have r1=3.960102,r2=3.9615554,…
window of the bifurcation diagram. Then we have r1=3.960102,r2=3.9615554,… , with the limit r∞=3.96155658717…
, with the limit r∞=3.96155658717… . This has a different pair of Feigenbaum constants δ=981.6…,α=38.82…
. This has a different pair of Feigenbaum constants δ=981.6…,α=38.82… .
In general, each period-multiplying route to chaos has its own pair of Feigenbaum constants. In fact, there are typically more than one. For example, for period-7-pling, there are at least 9 different pairs of Feigenbaum constants.
.
In general, each period-multiplying route to chaos has its own pair of Feigenbaum constants. In fact, there are typically more than one. For example, for period-7-pling, there are at least 9 different pairs of Feigenbaum constants. , and the relation becomes exact as both numbers increase to infinity: limδ/α2=2/3
, and the relation becomes exact as both numbers increase to infinity: limδ/α2=2/3 .
.
 For a particular form of solution with a quadratic dependence of the solution near x = 0, α = 2.5029… is one of the
For a particular form of solution with a quadratic dependence of the solution near x = 0, α = 2.5029… is one of the 
 for any map on the
for any map on the  at the onset of chaos.
at the onset of chaos.
 Chaos theory states that within the apparent randomness of chaotic complex systems, there are underlying patterns, interconnection, constant feedback loops, repetition, self-similarity, fractals and self-organization. The butterfly effect, an underlying principle of chaos, describes how a small change in one state of a deterministic nonlinear system can result in large differences in a later state (meaning there is sensitive dependence on initial conditions).
Chaos theory states that within the apparent randomness of chaotic complex systems, there are underlying patterns, interconnection, constant feedback loops, repetition, self-similarity, fractals and self-organization. The butterfly effect, an underlying principle of chaos, describes how a small change in one state of a deterministic nonlinear system can result in large differences in a later state (meaning there is sensitive dependence on initial conditions).
 This can happen even though these systems are deterministic, meaning that their future behavior follows a unique evolution and is fully determined by their initial conditions, with no random elements involved. In other words, the deterministic nature of these systems does not make them predictable.
This can happen even though these systems are deterministic, meaning that their future behavior follows a unique evolution and is fully determined by their initial conditions, with no random elements involved. In other words, the deterministic nature of these systems does not make them predictable.
 In common usage, “chaos” means “a state of disorder”. However, in chaos theory, the term is defined more precisely. Although no universally accepted mathematical definition of chaos exists, a commonly used definition, originally formulated by Robert L. Devaney, says that to classify a dynamical system as chaotic, it must have these properties:
In common usage, “chaos” means “a state of disorder”. However, in chaos theory, the term is defined more precisely. Although no universally accepted mathematical definition of chaos exists, a commonly used definition, originally formulated by Robert L. Devaney, says that to classify a dynamical system as chaotic, it must have these properties:

 ,
,  and
and  were 45.91, 16 and 4 respectively. As can be seen from the graph, even the slightest difference in initial values causes significant changes after about 12 seconds of evolution in the three cases. This is an example of sensitive dependence on initial conditions.
were 45.91, 16 and 4 respectively. As can be seen from the graph, even the slightest difference in initial values causes significant changes after about 12 seconds of evolution in the three cases. This is an example of sensitive dependence on initial conditions. , the two trajectories end up diverging at a rate given by
, the two trajectories end up diverging at a rate given by

 is the time and λ
is the time and λ is the Lyapunov exponent. The rate of separation depends on the orientation of the initial separation vector, so a whole spectrum of Lyapunov exponents can exist. The number of Lyapunov exponents is equal to the number of dimensions of the phase space, though it is common to just refer to the largest one. For example, the maximal Lyapunov exponent (MLE) is most often used, because it determines the overall predictability of the system. A positive MLE is usually taken as an indication that the system is chaotic.
In addition to the above property, other properties related to sensitivity of initial conditions also exist. These include, for example,
is the Lyapunov exponent. The rate of separation depends on the orientation of the initial separation vector, so a whole spectrum of Lyapunov exponents can exist. The number of Lyapunov exponents is equal to the number of dimensions of the phase space, though it is common to just refer to the largest one. For example, the maximal Lyapunov exponent (MLE) is most often used, because it determines the overall predictability of the system. A positive MLE is usually taken as an indication that the system is chaotic.
In addition to the above property, other properties related to sensitivity of initial conditions also exist. These include, for example,  Six iterations of a set of states passed through the logistic map. The first iterate (blue) is the initial condition, which essentially forms a circle. Animation shows the first to the sixth iteration of the circular initial conditions. It can be seen that mixing occurs as we progress in iterations. The sixth iteration shows that the points are almost completely scattered in the phase space. Had we progressed further in iterations, the mixing would have been homogeneous and irreversible. The logistic map has equation . To expand the state-space of the logistic map into two dimensions, a second state, , was created as , if and otherwise.
Six iterations of a set of states passed through the logistic map. The first iterate (blue) is the initial condition, which essentially forms a circle. Animation shows the first to the sixth iteration of the circular initial conditions. It can be seen that mixing occurs as we progress in iterations. The sixth iteration shows that the points are almost completely scattered in the phase space. Had we progressed further in iterations, the mixing would have been homogeneous and irreversible. The logistic map has equation . To expand the state-space of the logistic map into two dimensions, a second state, , was created as , if and otherwise.![{displaystyle [x,y]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1b7bd6292c6023626c6358bfd3943a031b27d663) passed through the logistic map. The first iterate (blue) is the initial condition, which essentially forms a circle. Animation shows the first to the sixth iteration of the circular initial conditions. It can be seen that mixing occurs as we progress in iterations. The sixth iteration shows that the points are almost completely scattered in the phase space. Had we progressed further in iterations, the mixing would have been homogeneous and irreversible. The logistic map has equation
passed through the logistic map. The first iterate (blue) is the initial condition, which essentially forms a circle. Animation shows the first to the sixth iteration of the circular initial conditions. It can be seen that mixing occurs as we progress in iterations. The sixth iteration shows that the points are almost completely scattered in the phase space. Had we progressed further in iterations, the mixing would have been homogeneous and irreversible. The logistic map has equation  . To expand the state-space of the logistic map into two dimensions, a second state,
. To expand the state-space of the logistic map into two dimensions, a second state,  , was created as
, was created as  , if
, if  and
and  otherwise.
otherwise. The map defined by x → 4 x (1 – x) and y → (x + y) mod 1 also displays topological mixing. Here, the blue region is transformed by the dynamics first to the purple region, then to the pink and red regions, and eventually to a cloud of vertical lines scattered across the space.
The map defined by x → 4 x (1 – x) and y → (x + y) mod 1 also displays topological mixing. Here, the blue region is transformed by the dynamics first to the purple region, then to the pink and red regions, and eventually to a cloud of vertical lines scattered across the space. is said to be topologically transitive if for any pair of non-empty
is said to be topologically transitive if for any pair of non-empty  , there exists
, there exists  such that V≠∅
such that V≠∅ . Topological transitivity is a weaker version of
. Topological transitivity is a weaker version of  →
→  →
→  The Lorenz attractor displays chaotic behavior. These two plots demonstrate sensitive dependence on initial conditions within the region of phase space occupied by the attractor.
The Lorenz attractor displays chaotic behavior. These two plots demonstrate sensitive dependence on initial conditions within the region of phase space occupied by the attractor. Coexisting chaotic and non-chaotic attractors within the generalized Lorenz model There are 128 orbits in different colors, beginning with different initial conditions for dimensionless time between 0.625 and 5 and a heating parameter r = 680. Chaotic orbits recurrently return close to the saddle point at the origin. Nonchaotic orbits eventually approach one of two stable critical points, as shown with large blue dots. Chaotic and nonchaotic orbits occupy different regions of attraction within the phase space.
Coexisting chaotic and non-chaotic attractors within the generalized Lorenz model There are 128 orbits in different colors, beginning with different initial conditions for dimensionless time between 0.625 and 5 and a heating parameter r = 680. Chaotic orbits recurrently return close to the saddle point at the origin. Nonchaotic orbits eventually approach one of two stable critical points, as shown with large blue dots. Chaotic and nonchaotic orbits occupy different regions of attraction within the phase space. Bifurcation diagram of the logistic map x → r x (1 – x). Each vertical slice shows the attractor for a specific value of r. The diagram displays period-doubling as r increases, eventually producing chaos. Darker points are visited more frequently.
Discrete chaotic systems, such as the logistic map, can exhibit strange attractors whatever their dimensionality. In contrast, for continuous dynamical systems, the Poincaré–Bendixson theorem shows that a strange attractor can only arise in three or more dimensions. Finite-dimensional linear systems are never chaotic; for a dynamical system to display chaotic behavior, it must be either nonlinear or infinite-dimensional.
The Poincaré–Bendixson theorem states that a two-dimensional differential equation has very regular behavior. The Lorenz attractor discussed below is generated by a system of three differential equations such as:
Bifurcation diagram of the logistic map x → r x (1 – x). Each vertical slice shows the attractor for a specific value of r. The diagram displays period-doubling as r increases, eventually producing chaos. Darker points are visited more frequently.
Discrete chaotic systems, such as the logistic map, can exhibit strange attractors whatever their dimensionality. In contrast, for continuous dynamical systems, the Poincaré–Bendixson theorem shows that a strange attractor can only arise in three or more dimensions. Finite-dimensional linear systems are never chaotic; for a dynamical system to display chaotic behavior, it must be either nonlinear or infinite-dimensional.
The Poincaré–Bendixson theorem states that a two-dimensional differential equation has very regular behavior. The Lorenz attractor discussed below is generated by a system of three differential equations such as:

 ,
,  make up the
make up the ![{displaystyle psi _{n+1}({vec {r}},t)=int K({vec {r}}-{vec {r}}^{,},t)f[psi _{n}({vec {r}}^{,},t)]d{vec {r}}^{,}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dbad9689ef6e3759ba8c806bbf568a7d3ff90518) ,
where kernel
,
where kernel  is propagator derived as Green function of a relevant physical system,
is propagator derived as Green function of a relevant physical system,
![{displaystyle f[psi _{n}({vec {r}},t)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9fa3ba17d6e2b56466d57d8b60a2e46ec4925b90) might be logistic map alike
might be logistic map alike ![{displaystyle psi rightarrow Gpsi [1-tanh(psi )]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fec62ff5ebcf9fac8e71b101d6d2da0ef37f2df2) or
or ![{displaystyle f[psi ]=psi ^{2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/331a4c25ef04f99d8d77f2be74bf1fa8a4ec21b2) or
or  may serve. When wave propagation problems at distance L=ct
may serve. When wave propagation problems at distance L=ct with wavelength λ=2π/k
with wavelength λ=2π/k are considered the kernel K
are considered the kernel K may have a form of Green function for
may have a form of Green function for ![{displaystyle K({vec {r}}-{vec {r}}^{,},L)={frac {ikexp[ikL]}{2pi L}}exp[{frac {ik|{vec {r}}-{vec {r}}^{,}|^{2}}{2L}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/634f66d2d768bec45cbd9d5b17fea78dd2d2ef88) .
.


 A conus textile shell, similar in appearance to Rule 30, a cellular automaton with chaotic behaviour
A conus textile shell, similar in appearance to Rule 30, a cellular automaton with chaotic behaviour Traffic forecasting may benefit from applications of chaos theory. Better predictions of when a congestion will occur would allow measures to be taken to disperse it before it would have occurred. Combining chaos theory principles with a few other methods has led to a more accurate short-term prediction model (see the plot of the BML traffic model at right).
Chaos theory has been applied to environmental water cycle data (also hydrological data), such as rainfall and streamflow. These studies have yielded controversial results, because the methods for detecting a chaotic signature are often relatively subjective. Early studies tended to “succeed” in finding chaos, whereas subsequent studies and meta-analyses called those studies into question and provided explanations for why these datasets are not likely to have low-dimension chaotic dynamics.
Traffic forecasting may benefit from applications of chaos theory. Better predictions of when a congestion will occur would allow measures to be taken to disperse it before it would have occurred. Combining chaos theory principles with a few other methods has led to a more accurate short-term prediction model (see the plot of the BML traffic model at right).
Chaos theory has been applied to environmental water cycle data (also hydrological data), such as rainfall and streamflow. These studies have yielded controversial results, because the methods for detecting a chaotic signature are often relatively subjective. Early studies tended to “succeed” in finding chaos, whereas subsequent studies and meta-analyses called those studies into question and provided explanations for why these datasets are not likely to have low-dimension chaotic dynamics.
 be a function which specifies the dynamics of the system. That is, if a
be a function which specifies the dynamics of the system. That is, if a is a point in an n
is a point in an n and, for a positive value of t
and, for a positive value of t is the result of the evolution of this state after t
is the result of the evolution of this state after t with coordinates (x,v)
with coordinates (x,v) , where x
, where x is its velocity, a=(x,v)
is its velocity, a=(x,v) , and the evolution is given by
, and the evolution is given by


 of the
of the  : if a
: if a .
. , which consists of all points b
, which consists of all points b that “enter” A
that “enter” A . More formally, B(A)
. More formally, B(A) of A
of A such that f(t,b)∈N
such that f(t,b)∈N for all real t>T
for all real t>T .
. , the Euclidean norm is typically used.
Many other definitions of attractor occur in the literature. For example, some authors require that an attractor have positive
, the Euclidean norm is typically used.
Many other definitions of attractor occur in the literature. For example, some authors require that an attractor have positive 

 A time series corresponding to this attractor is a quasiperiodic series: A discretely sampled sum of Nt periodic functions (not necessarily sine waves) with incommensurate frequencies. Such a time series does not have a strict periodicity, but its power spectrum still consists only of sharp lines.[citation needed]
A time series corresponding to this attractor is a quasiperiodic series: A discretely sampled sum of Nt periodic functions (not necessarily sine waves) with incommensurate frequencies. Such a time series does not have a strict periodicity, but its power spectrum still consists only of sharp lines.[citation needed]


 . The colour of a point indicates how often the point (r,x)
. The colour of a point indicates how often the point (r,x) is visited over the course of 106 iterations: frequently encountered values are coloured in blue, less frequently encountered values are yellow. A
is visited over the course of 106 iterations: frequently encountered values are coloured in blue, less frequently encountered values are yellow. A  , a second bifurcation (leading to four attractor values) around r≈3.5
, a second bifurcation (leading to four attractor values) around r≈3.5 . The behaviour is increasingly complicated for r>3.6
. The behaviour is increasingly complicated for r>3.6 , interspersed with regions of simpler behaviour (white stripes).
, interspersed with regions of simpler behaviour (white stripes). , whose basins of attraction for various values of the parameter r
, whose basins of attraction for various values of the parameter r , all starting x
, all starting x will rapidly lead to function values that go to negative infinity; starting x
will rapidly lead to function values that go to negative infinity; starting x will also go to negative infinity. But for 0<x<1
will also go to negative infinity. But for 0<x<1 , i.e. at this value of r
, i.e. at this value of r and x≈0.799
and x≈0.799 . At some values of r
. At some values of r values of x
values of x diverges to infinity if |a|>1
diverges to infinity if |a|>1 from all initial points except 0; there is no attractor and therefore no basin of attraction. But if |a|<1
from all initial points except 0; there is no attractor and therefore no basin of attraction. But if |a|<1 all points on the number line map asymptotically (or directly in the case of 0) to 0; 0 is the attractor, and the entire number line is the basin of attraction.
Likewise, a linear
all points on the number line map asymptotically (or directly in the case of 0) to 0; 0 is the attractor, and the entire number line is the basin of attraction.
Likewise, a linear  , of the homogeneous form Xt=AXt−1
, of the homogeneous form Xt=AXt−1 in terms of
in terms of  causes all initial values of x
causes all initial values of x but to converge to an attractor at the value 0 if a<0
but to converge to an attractor at the value 0 if a<0 , making the entire number line the basin of attraction for 0. And the matrix system dX/dt=AX
, making the entire number line the basin of attraction for 0. And the matrix system dX/dt=AX gives divergence from all initial points except the vector of zeroes if any eigenvalue of the matrix A
gives divergence from all initial points except the vector of zeroes if any eigenvalue of the matrix A , the following initial conditions are in successive basins of attraction:
, the following initial conditions are in successive basins of attraction:
